Summary:
I looked at all 10 events on Gabrielle's alog that are without "Those marked with ** look somwhat different in the spectral shape" caveat, i.e. I only picked the events that were similar according to Gabrielle.
We don't know what these are, we know that this is NOT a sensing side software/hardware glitch.
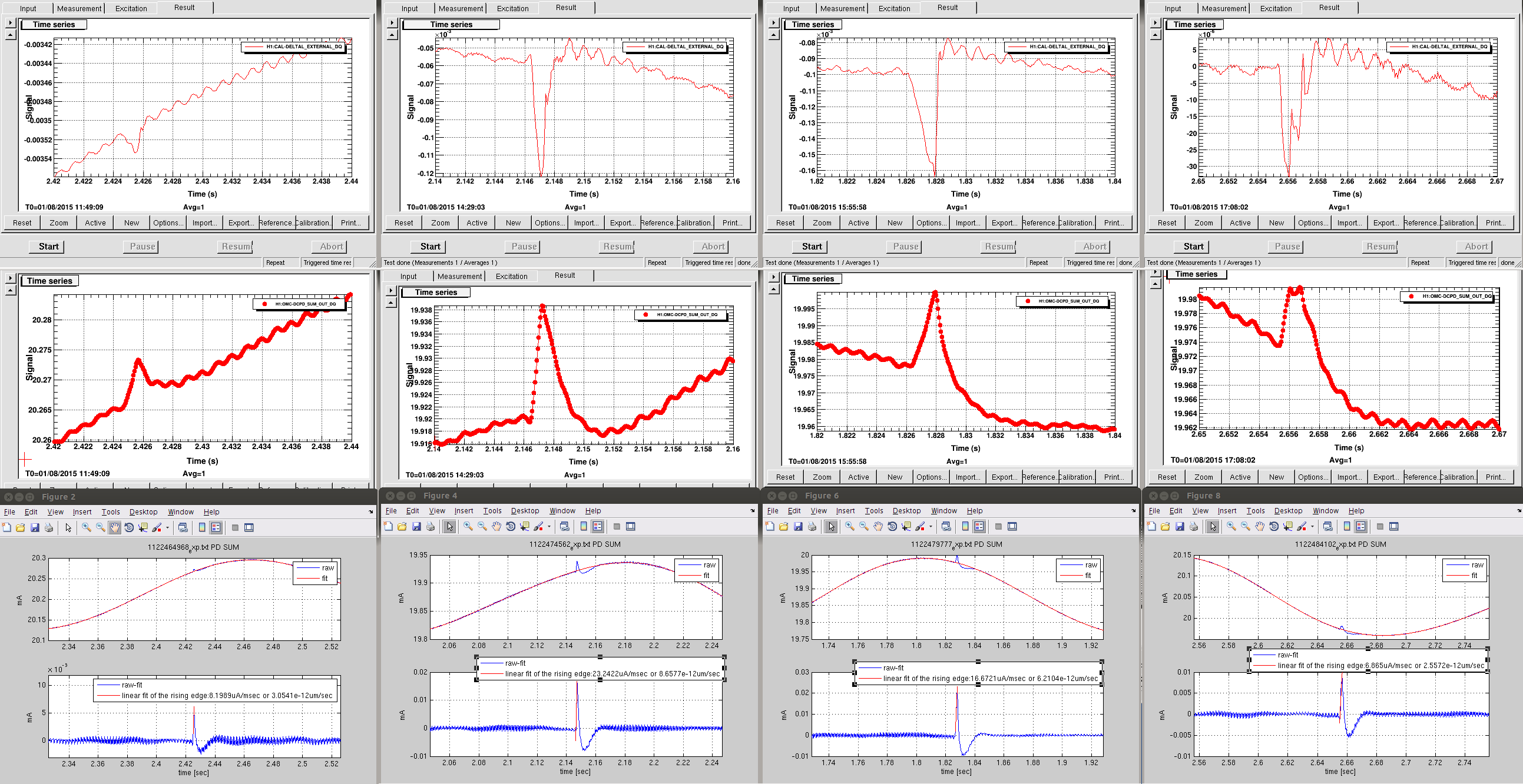
All of these look very similar (see attached). DCPD current suddenly shoots up, there's a msec-ish rise, and then an equally sudden and fast fall of msec order, then the servo slowly follows up.
Details:
The spikes for larger glitches are on the order of 10^-15m to 10^-14m, or 0.1%-ish RIN (0.02mA) (but there are smaller ones).
DC current increases, which means that X becomes shorter and/or Y becomes longer (if the IFO calibration is correct).
What we were able to exclude so far is:
-
Any kind of sensing software/hardware glitches.
-
PDA and PDB are identical, DARM is identical to DCSUM sample to sample except a scaling factor, NULL doesn't show anything, and ASAIR_A_RF45_Q shows the same thing at the same timing which tells that RF45 thing was NOT the result of the DARM servo imprinting the signal to DARM.
Things that are not yet completely killed are:
-
Dust.
-
If it causes phase delay in Y arm, the sign of the thing is consistent with X-Y going negative.
-
The time scale of the thing is kind of right IF the dust is crossing the waist of the beam.
-
But the X arm dust glitches from June caused POP dc level and arm transmission to drop, which is not the case this time. In June there were events that caused the DCPD level to go up as well as down, which is not the case here.
-
Test mass motion.
-
Bulk mass going in one direction and then returning to the original position in 1msec time scale is very unlikely as we need 3 impacts. First one, the second one that is twice as large as the first one in the opposite direction, then the third one that is the same with the first.
-
However, an impact on the mass followed by an excitation of resonance(s) might make it appear as a short glitch according to Gabrielle's experience with VIRGO (fascinating story about bursting bubbles in adhesives).
-
However, when Gabrielle looked at one event no significant excitation of anything was observed.
-
TCS glitch.
-
If TCSX laser power drops, that would make MICH X length smaller, so the sign of the thing is consistent.
-
However, the case against the bulk mass motion also holds true here. The power should drop for 1msec, then the power should go up twice as large as the drop for 1msec, and then to the original power. It's not very likely.
Is there anything that helps us understand if this is happening inside or outside of the arms?
Plots:
These are four biggest glitches from Gabrielle's list but I looked at all 10 that are without "look somewhat different" remark.
On top is the calibrated DARM displacement, properly dewhitened, and rewhitened again to make the glitch visible while keeping the phase intact above 600Hz or so, and mildly band-stopped (-20dB) second violin resonances. The "calibration" of this is 10^-10 meters, and the sign is correct for msec signal (i.e. positive means X-Y going positive).
Middle is the OMC DCPD SUM. DARM UGF is about 40Hz (1/e time = 1/2/pi/40=4msec), so the glitch shape is almost undisturbed by the DARM servo.
Bottom (of the bottom) is the shape of the glitch after subtracting the background motion in OMC DCPD SUM.


Did a quick scan through DV and there are 3 trips of the ETMY ISI from this bleedoff since July 6. It looks like there have been no trips of this type on the ETMX since then.