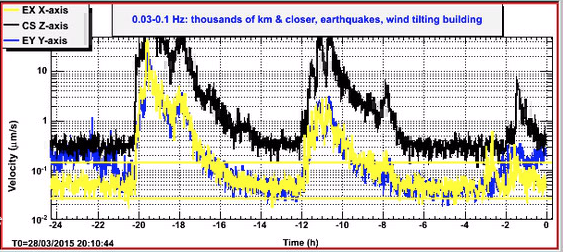
The optimal location for a single version of Krishna’s BRS (intermediate frequency tilt sensor), or, if it would be better to have two of them, depends on the tilt spectrum in the beam direction. We suspected that wind-induced tilt is worse at EY than EX, where the BRS is currently located, because, for typical wind storm directions, the building is being pushed roughly along the beam axis at Y-End and roughly perpendicular at X-End (the tumble weeds usually roll down the Y-Arm). But we aren’t sure whether a single sensor at EY would make sense (e.g. if EY is 10x worse than EX) or if two BRSs would be better. Since we have only the one BRS, we used the 0.03-0.08 Hz band of STS seismometers to compare the two stations. This frequency band was selected as a proxy for tilt because this band is below the microseismic peak frequency and, in windy conditions, ground motion in this band is usually dominated by tilt. Figure 1 shows the strong correlation between the 0.03-0.08 Hz seismometer band and the tilt measured by the BRS at EX for one wind storm. Each of the small points in the plots in this log represent a 60s average of the wind speed and a 60s fft of the ground motion.
Figure 2 shows 4 months (Aug 15, 2014 - Dec 15, 2014) of the 0.03 to 0.08 Hz beamline seismic band at EY and EX plotted against wind speed measured at EX. The large red and blue dots show the median of minute points in 2 MPH bins. Dipongkar has plotted the median because large earthquakes, which also appear in this band, would bias the mean. Roughly speaking, for a particular wind speed, the signal at EY is twice the signal at EX when averaged over many storms in 4 months. This data suggests to me that we may want a second BRS at EY rather than moving the sensor from EX to EY, because the difference is, on average, only a factor of 2.
The differences between the stations can change for different wind storms, possibly because of different wind directions. Figure 3 shows the effects of individual storms (each storm is a different color, the same color on both plots) at the two stations. One of the storms produced about 5 times more beam-line tilt at EY than at EX.
Caveat: Getting this data is very time-consuming, so we are putting in this log even though we have obtained only 4 months of data. Dipongkar will continue to increase coverage to include the spring windy period and we will update if necessary.
Robert Schofield, Dipongkar Talukder