ryan.crouch@LIGO.ORG - posted 20:18, Monday 16 March 2026 (89530)
OPS MOnday EVE shift summary
TITLE: 03/17 Eve Shift: 2330-0500 UTC (1630-2200 PST), all times posted in UTC
STATE of H1: Planned Engineering
INCOMING OPERATOR: None
SHIFT SUMMARY: I'm not convinced that the +90 phasing was correct for AS_B_RF45, the non-stellar alignment is making it tough to tell. PRMI locked fairly easily althought I can't seem to fix the Pitch misalignment, DRMI isn't so kind. It struggles to lock for more than ~7 seconds at the end of the shift.
LOG:
| Start Time | System | Name | Location | Lazer_Haz | Task | Time End |
|---|---|---|---|---|---|---|
| 23:40 | TCS | Sophie | Cheta | yes | Cheta work | 00:51 |
- RyanS and I saw MICH ASC seem (it didn't finish offloading and lost lock due to ALS locklosses) to work twice with a +90 phase on AS_B_RF45, later when I was trying alone it clearly took it in the wrong direction every time. I tried a -90 phase as well, which seemed to be working until it eventually pulls in the wrong direction and doesn't stop till it loses lock. The power is low so it doesn't have that much room for error. I tried touching up both PRM and the BS before engaging MICH_ASC with both -/+ 90 phases (and no phase) which did not work. -90 was more successful
- After maximizing PRMI as much as I could I moved on to struggling to lock DRMI, after it would lock I would try to max by hand then it would get unstable and shake sometimes as I was adjusting optics
- DRMI really didn't want to lock, the few times it did it lock for a few seconds it looked OK, a decent amount of pitch, it was also seemed unstable, the BS glitching wasn't helping.
- The alignment isn't great, it's definitely worse than it was on Friday, I haven't been able to touch it up enough
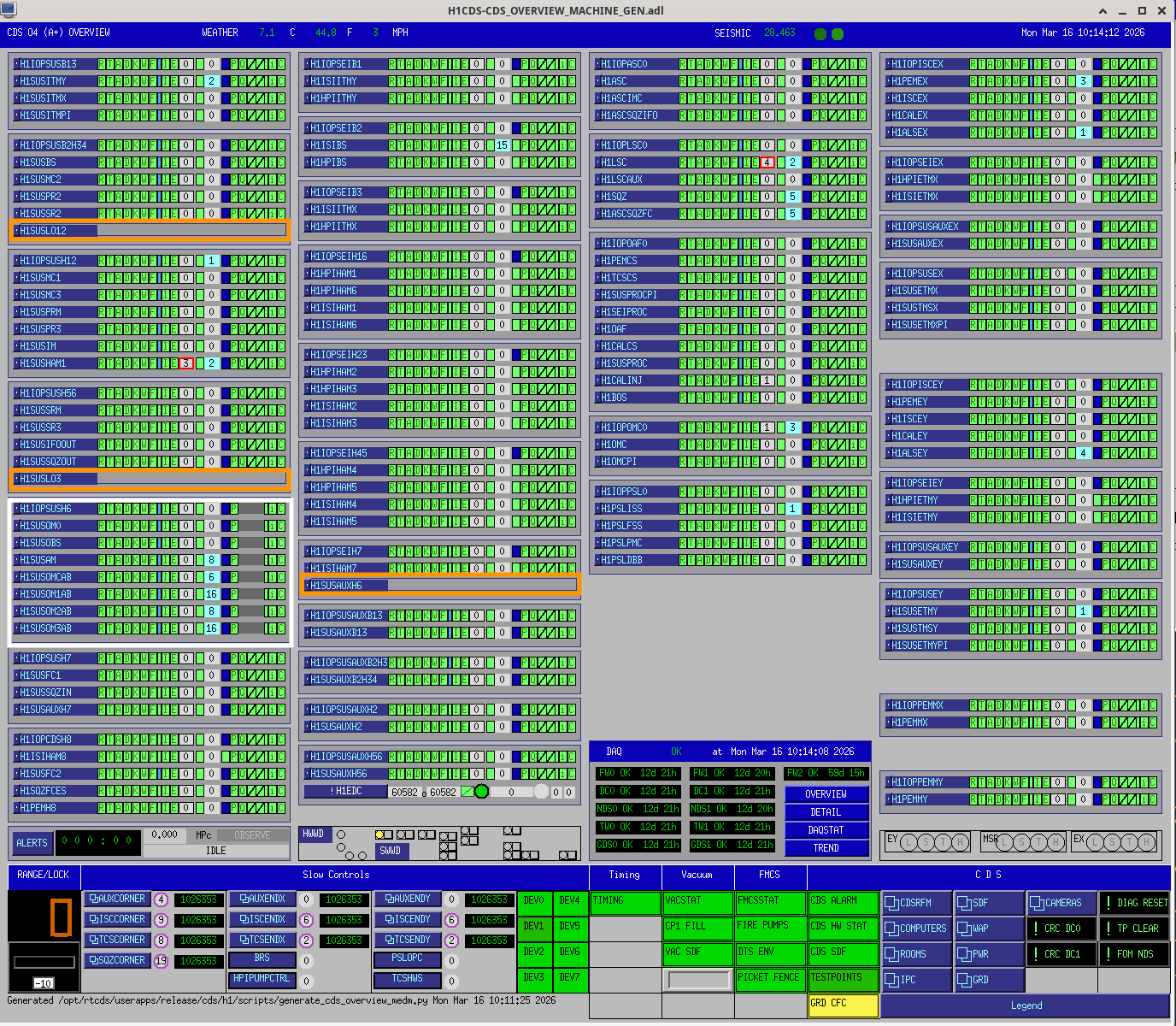
- NUC5 bottom monitor is having trouble connecting/seeing its display, NUC20 is really dim and so are some of NUCs on the left wall



















Ryan(s)
We added at +90 degree phase shift to the AS_B RF45 WFS to make the MICH loop work during PRMI ASC; screenshot attached of new values accepted in SDF. However, in testing this, the PRMI buildups didn't really improve, so it's possible more adjustments are needed here, which Ryan will check this evening.