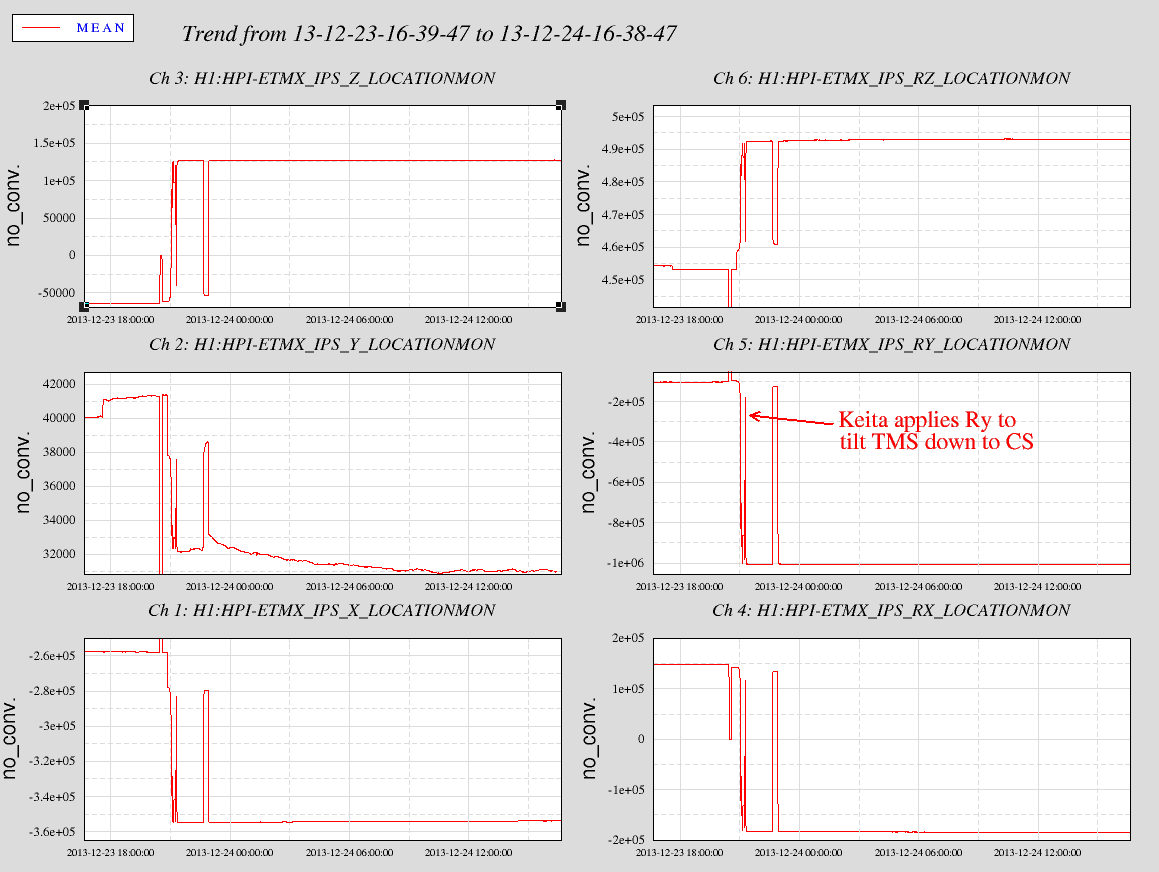
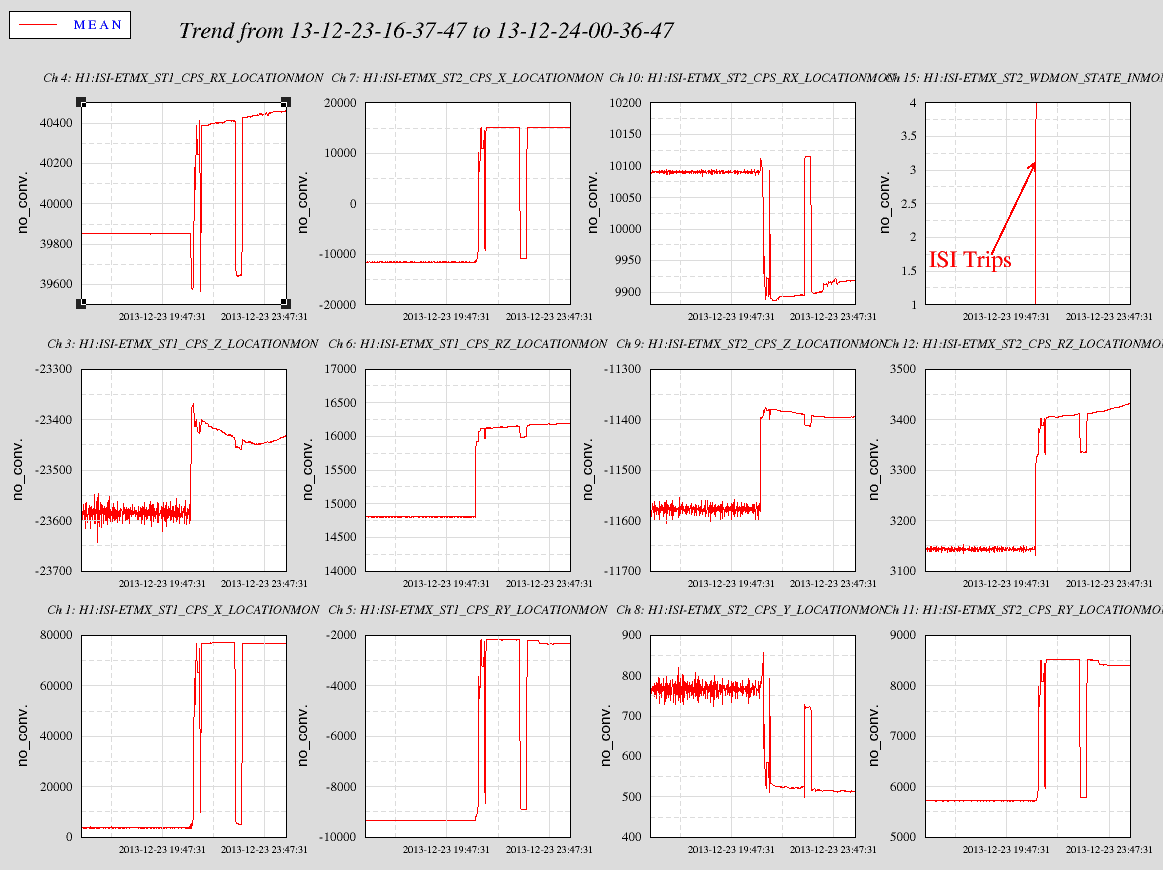
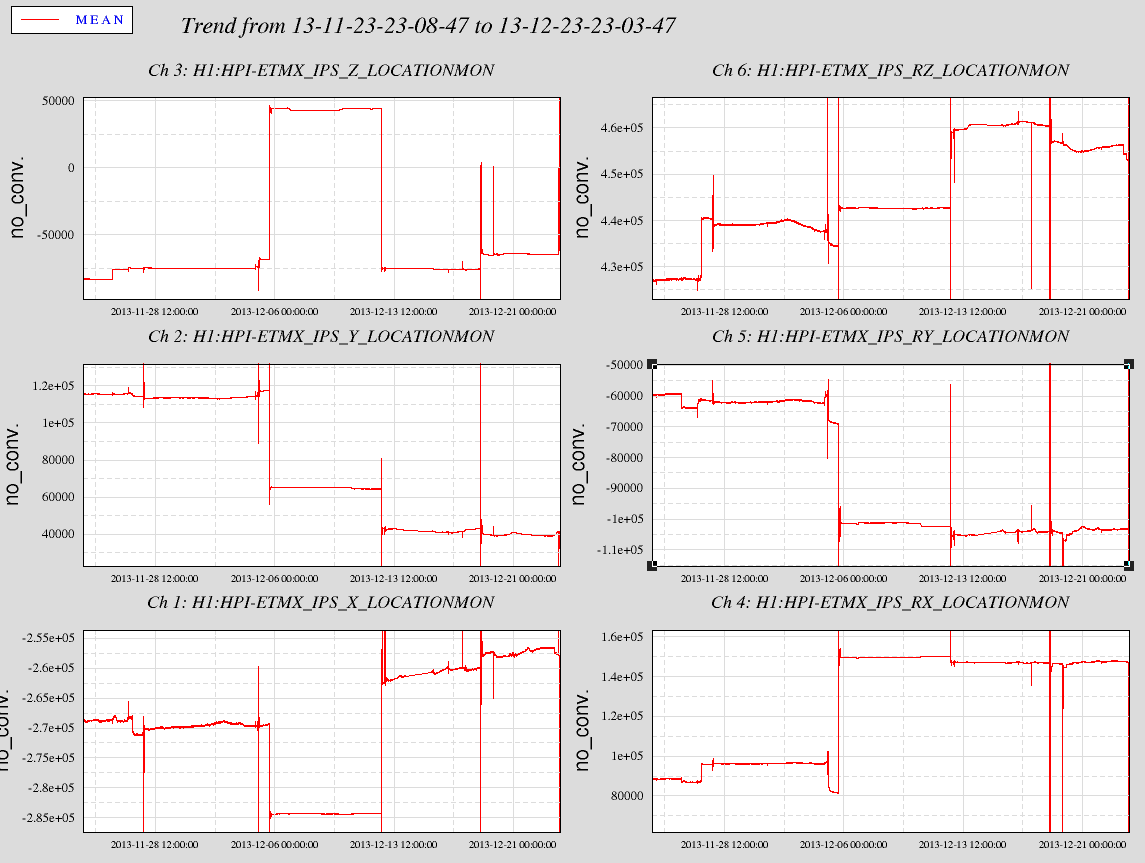
Yesterday Keita tilted the ETMx HEPI in -Ry to pitch the TMS system down to bring the ALS green beam down back at the ITMx. Attached is a plot showing the tilt around 1pm Monday pst. About an hour later, the SUS tripped triggering the ISI and HEPI. We restored the HEPI tilt but did not restore the ISI. It isn't that we forgot but we just didn't think it mattered. However there are DC bias steering offsets on the ISI as well although these are much smaller than the HEPI tilts. The second plot shows the changes in the ISI system with the watchdog tripped.
Couple things--this plot serves as a pretty good record for the steering offsets.
There is pretty significant off diagonal elements from the Ry tilting. Why? Primary is probably the lack of symmetrization filters evenning out the actuator drives. Also, so near the limits of IPS senssing (30/32), the actuators could actually be hitting mechanical stops. The -12000 ct offset in the blend path calcs to a 0.9mrad tilt according to the incorrect IPS2CART matrix. This is actually closer to 0.45mrads but at 2m distance to the Piers, the actuator and IPS are nearly railed. This also gives ~0.17mrads Rx and 10urads Rz corrected. The X Y Z values are correct at .1, .08, & .2um respectively.
Looking at the second plot showing the CPS LocationMons, when the ISI trips and the locations are free to go hang where they may, you see largest motions on Stage1 X, 70um; Stage2 X, 30um and the Ry numbers ~4urads. There are some problems with the CPS matrices too but I think they are mostly sign errors. Anyway it is interesting to see the ISI respond as you'd expect: Tilt the HEPI Ry and see the free hanging ISI tilt Ry and shift X, cool. You might think the ISI would tilt as much as the HEPI but if these numbers are right you'd have to admit they do not. Is that the stiffness of the flexures? How does it impact the Isolation performance?