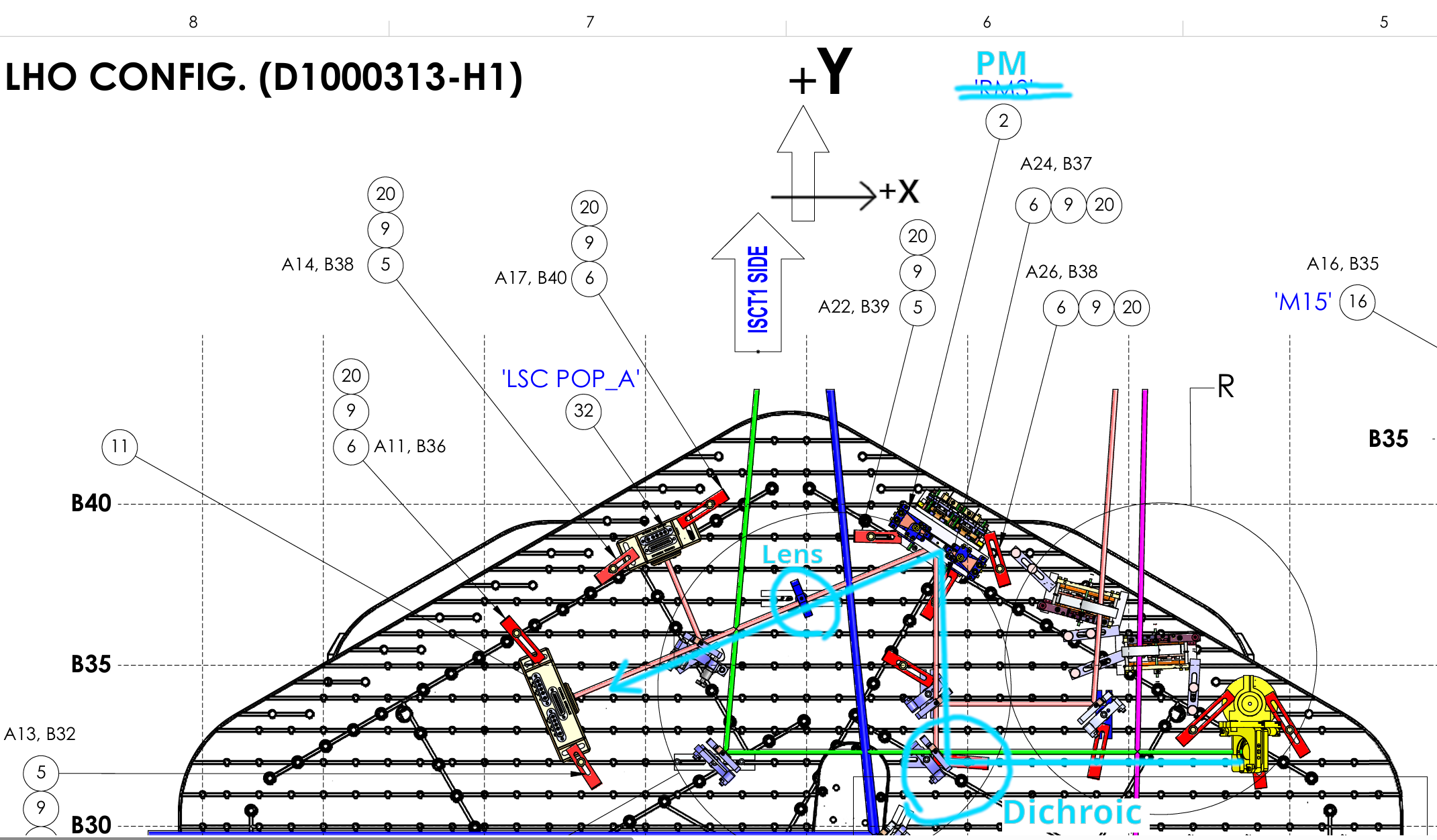
Due to a mistake in past CHETA models there is more astigmatism then expected on the tables and a change in beam size at the ITM. The astigmatism can be fixed by rotating L1 around the vertical axis and the beam size can be changed by movind L2 using the translation stage in each setup. Using a modified Fintrace model the required rotation angle and translation for each table as they are currently populated at LHO (0922, 0918) and LLO (0919, 0851) have been calculated and are shown below.
The tables below give the current astigmatism and then the angles and translations such that the x and y beamsize on the ITM is 52.7mm with no astigmatism.
This code is avaliable in the CHETA modelling repository.
| Unit | Current astig [mm] | Rotation angle of L1 [deg] | Translation [mm] | ITM wx [mm] | ITM wy [mm] |
| 0922 | -7.69 | 10.17 | -0.12 | 52.7 | 52.7 |
| 0918 | -4.02 | 11.84 | -12.89 | 52.7 | 52.7 |
| 0919 | -7.55 | 12.17 | 3.81 | 52.7 | 52.7 |
| 0851 | -5.76 | 11.13 | 3.73 | 52.7 | 52.7 |
Without translating of L2 astigmatism can be removed but the beam size is still unoptimised.
| Unit | Current atig [mm] | Angle [deg] | ITM wx [mm] | ITM wy [mm] |
| 0922 | -7.69 | 10.17 | 52.75 | 52.75 |
| 0918 | -4.02 | 11.18 | 55.39 | 55.39 |
| 0919 | -7.55 | 12.03 | 50.95 | 50.95 |
| 0851 | -5.76 | 11.24 | 51.80 | 51.80 |










At Elennas' good suggestion, I added the IMC_power_adjust_func() to the IMC_LOCK's ACQUIRE state, so that it will adjust the IMC's FASTGAIN, so that the fast gain won't be wildly high when trying to acquire at higher powers.
I did modify the function, so that if we're in ACQUIRE, it uses a FASTGAIN 5dB lower than the operating nominal gain. This makes it match the 2W acquisition situation, where the fastgain was always acquiring at 0dB, and then for a 2W IMC lock would increase during the BOOST state to 5 dB.
The IMC will lock at 10W, but it takes a long time. It's a little happier at 8W. It's still perfectly happy at 2W (which makes sense, since none of the 2W settings have changed).
I'm pausing any further testing, since the Xarm is open for our green peek.