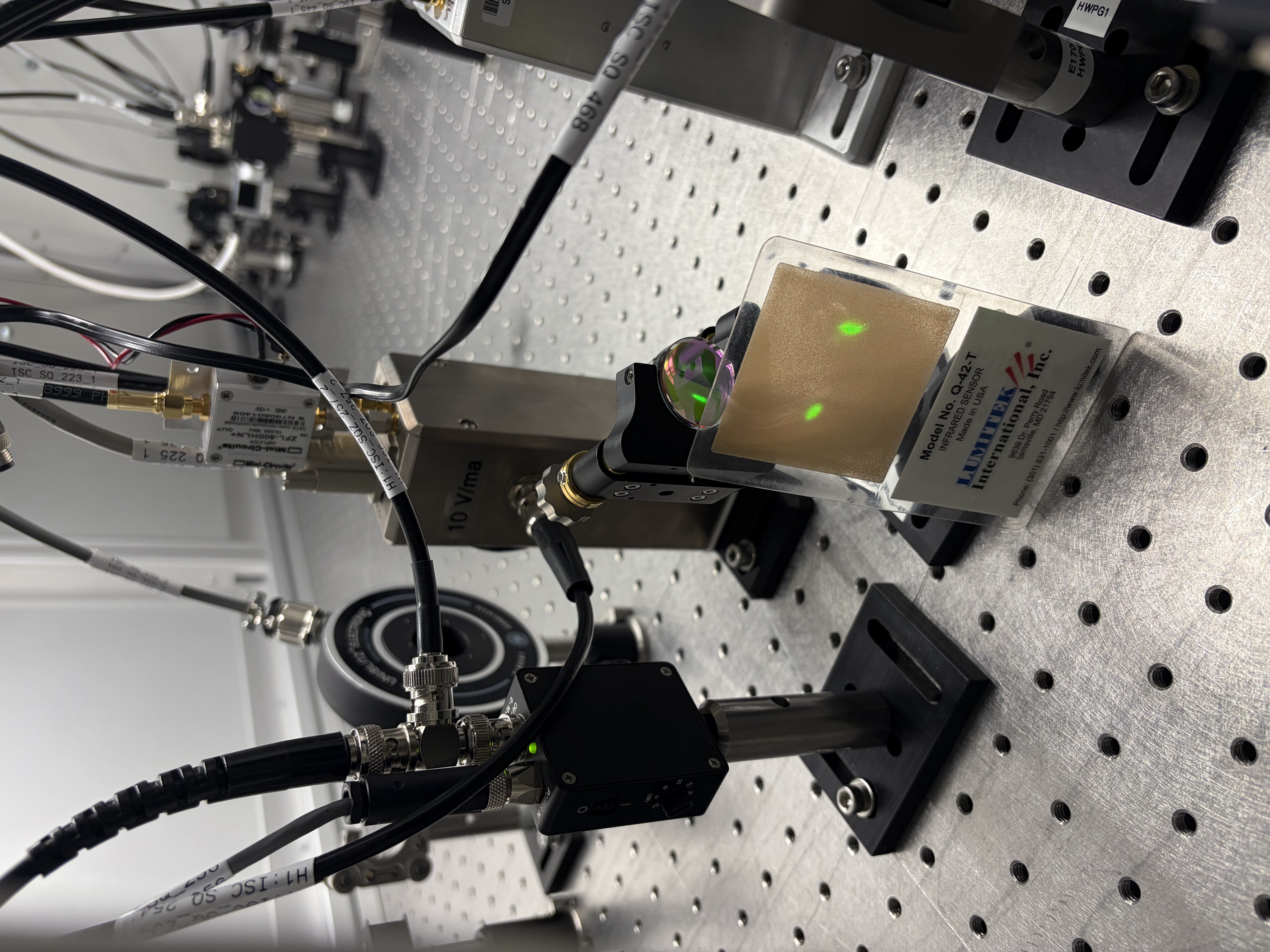
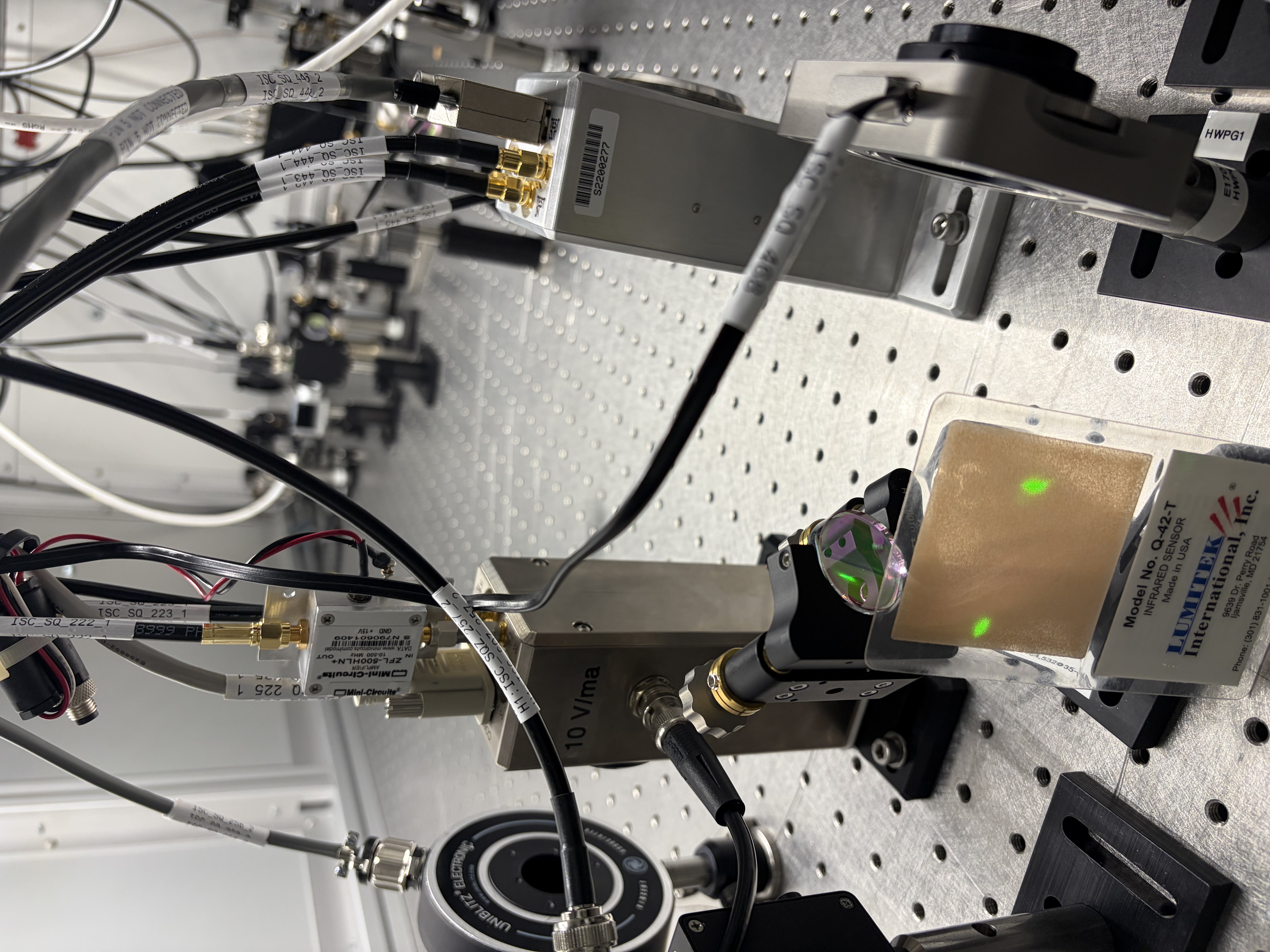
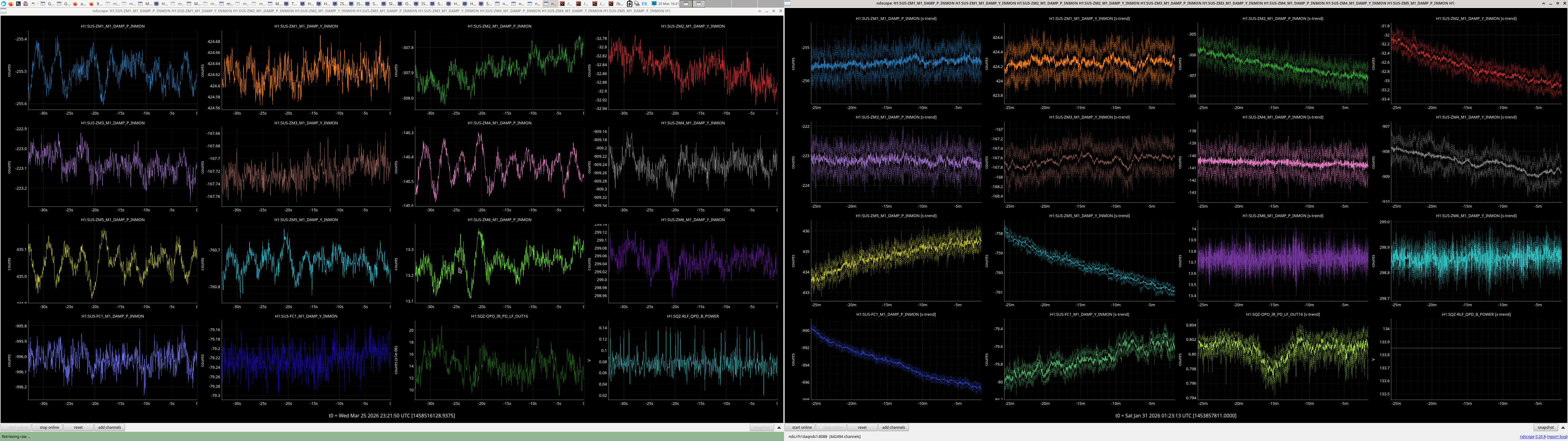
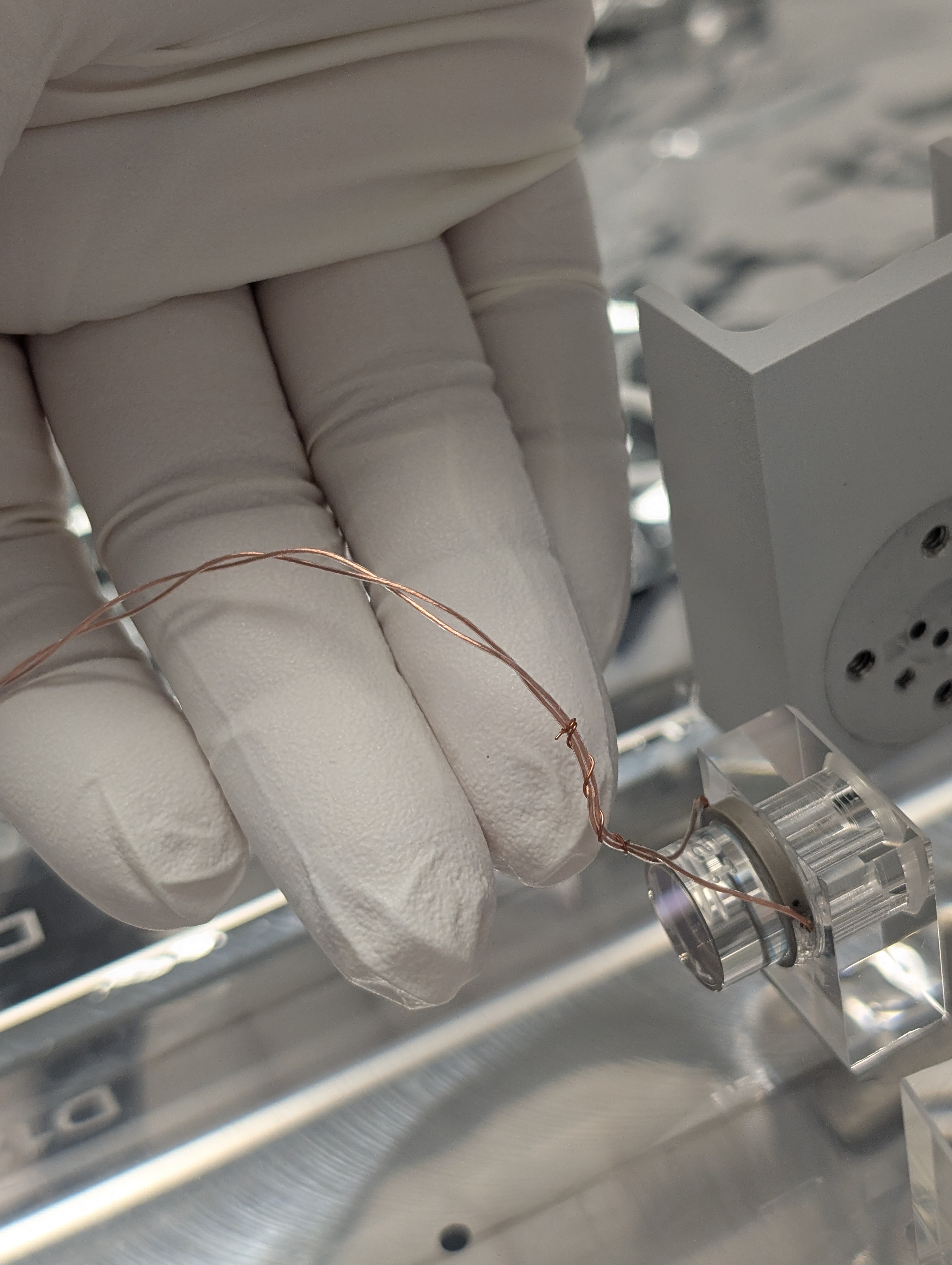
I returned to the slider positions where we had good green and IR flashes in the filter cavity from Wed 89629. Since this time of good flashes the H:M2 pico was reverted to 0 (it's setting during in chamber work), so the green flashes weren't as high as they were on Wed. Screenshot attached here. In this alignment I went to SQZT7 and looked at the green reflection, it looks like an oval but is coming to the persicope. (photo)
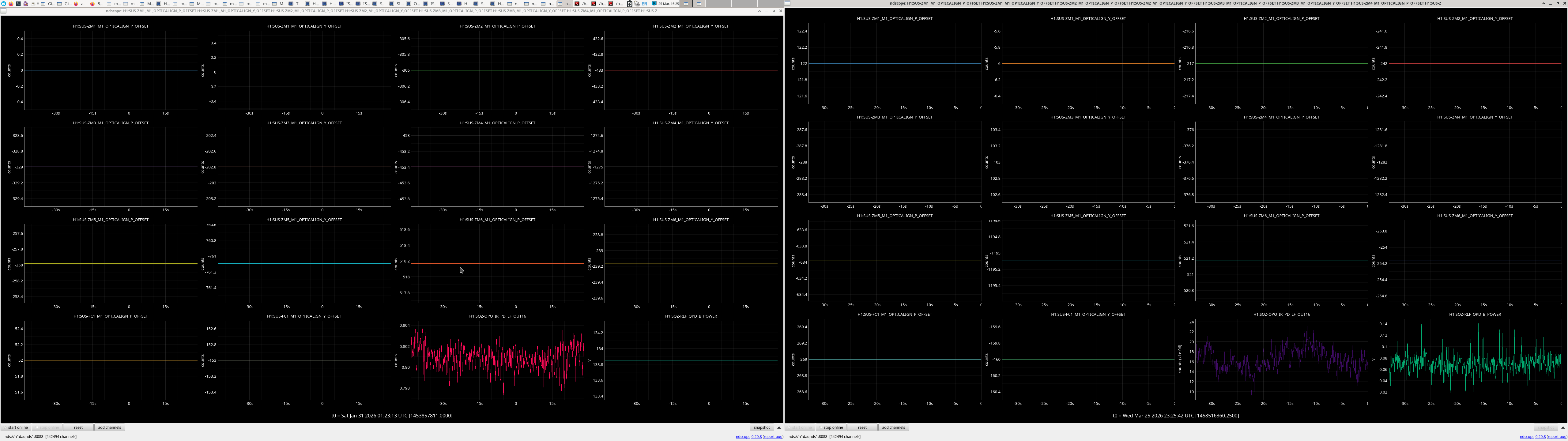
While at the table, I moved the picomotor for H:M2 X to -710, which is where Tony and I had put it 89596 and where we had both IR and green flashes good. I could see the beam move on SQZT7, but it wasn't a big move, and after pico'ing it looks like we still have an oval beam making it to the table.. (photo, screenshot) On the cameras we can clearly see cavity flashes in green but the IR flashes were off the camera, so I went to FCES and centered the flashes on the IR camera (using the seed). I also went back to sqzt7 and aligned the FC green refl onto the diode.
While I was there, I watched the green beam on a card while I moved suspensions to see how much freedom we have to move the suspensions and still get the green beam out of the viewport. I could move ZM1,2,3 and FC1 by a couple hundred urad in both pitch and yaw (although not in either direction), so there is a reasonable adjustment range. Moving these didn't impact the oblong shape of teh beam, so it doesn't seem like that is caused by clipping. I then moved the ZM2 psams settings, and saw a big change in beam shape, it became more round looking on a card for strain guages of 4.15 or 5.15 (our usual setting is 3.15).
I left the alignment back at the one that gave good flashes for IR and green (up to 10, is off in pitch), and with the CLF IR flashes are max 0.15 counts.