ryan.crouch@LIGO.ORG - posted 15:57, Saturday 28 October 2023 - last comment - 16:15, Saturday 28 October 2023(73806)
OPS Saturday eve shift start
TITLE: 10/28 Eve Shift: 23:00-07:00 UTC (16:00-00:00 PST), all times posted in UTC
STATE of H1: Lock Acquisition
OUTGOING OPERATOR: Camilla (DAY)
CURRENT ENVIRONMENT:
SEI_ENV state: CALM
Wind: 5mph Gusts, 4mph 5min avg
Primary useism: 0.02 μm/s
Secondary useism: 0.11 μm/s
QUICK SUMMARY:
- We're locked at NLN waiting on the ADS to converge to go into observing
- All systems look good, we're currently riding through a small earthquake
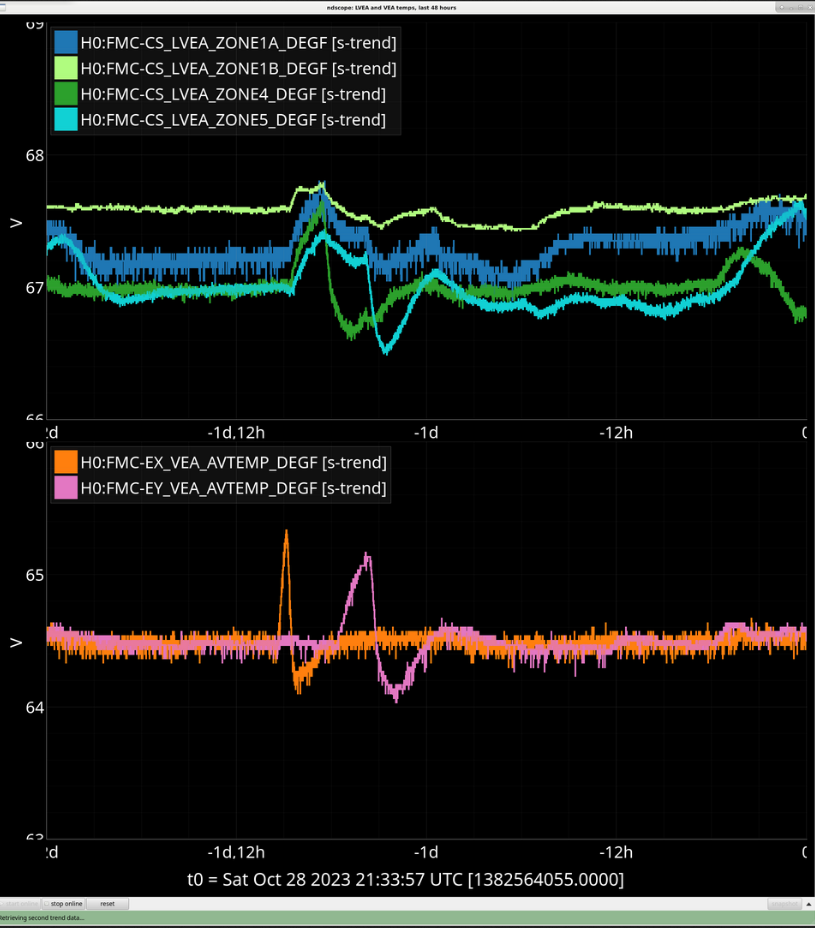
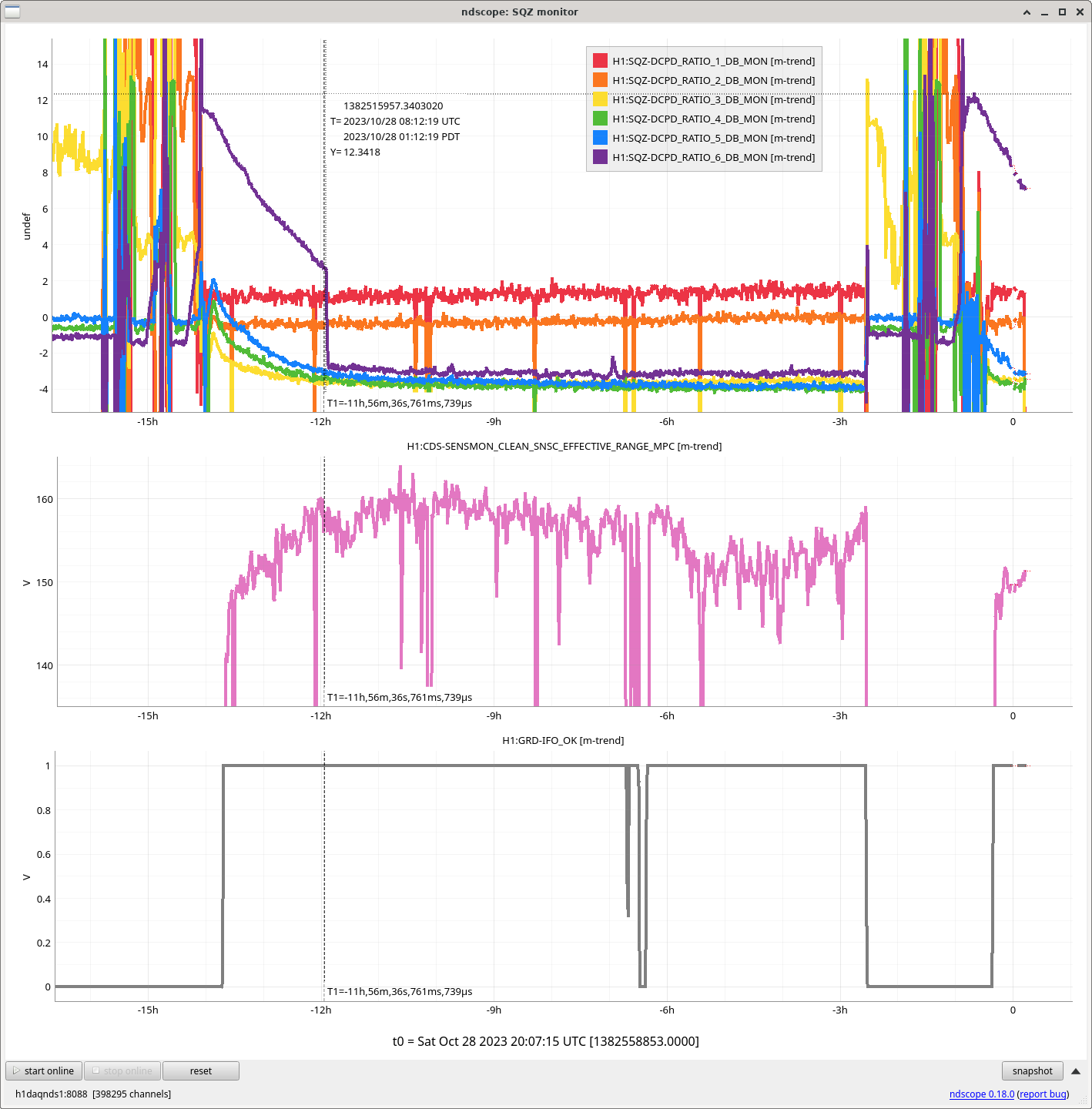
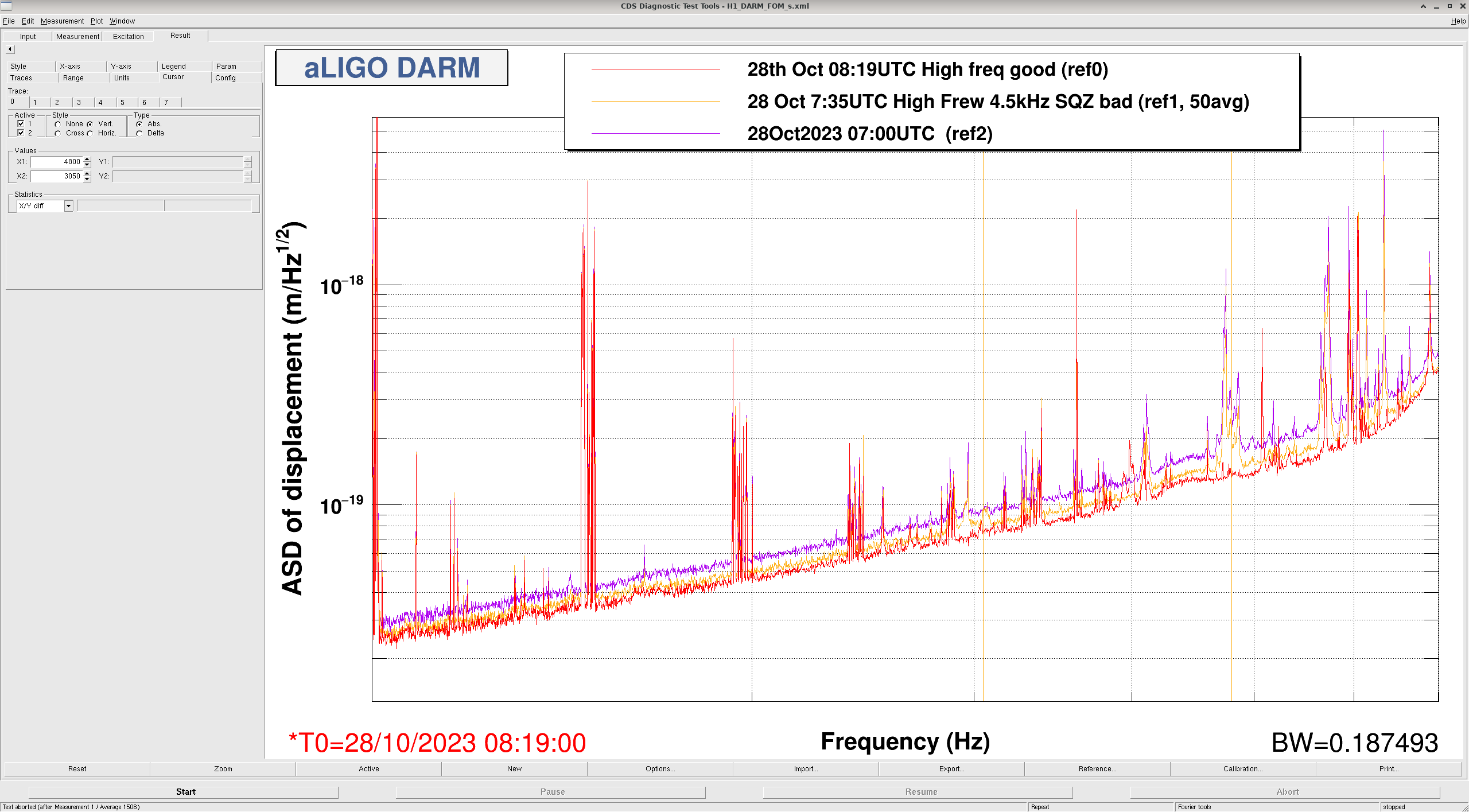
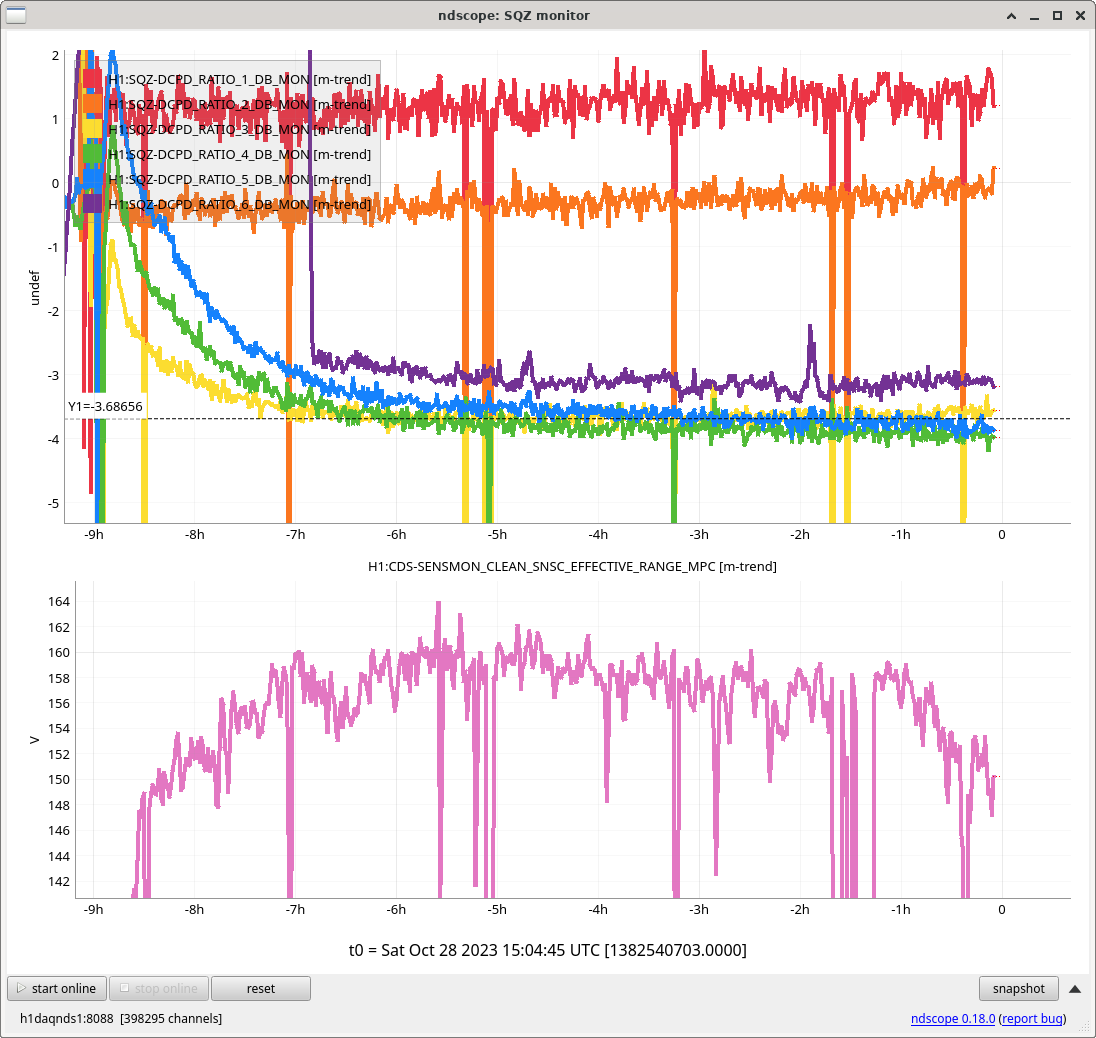
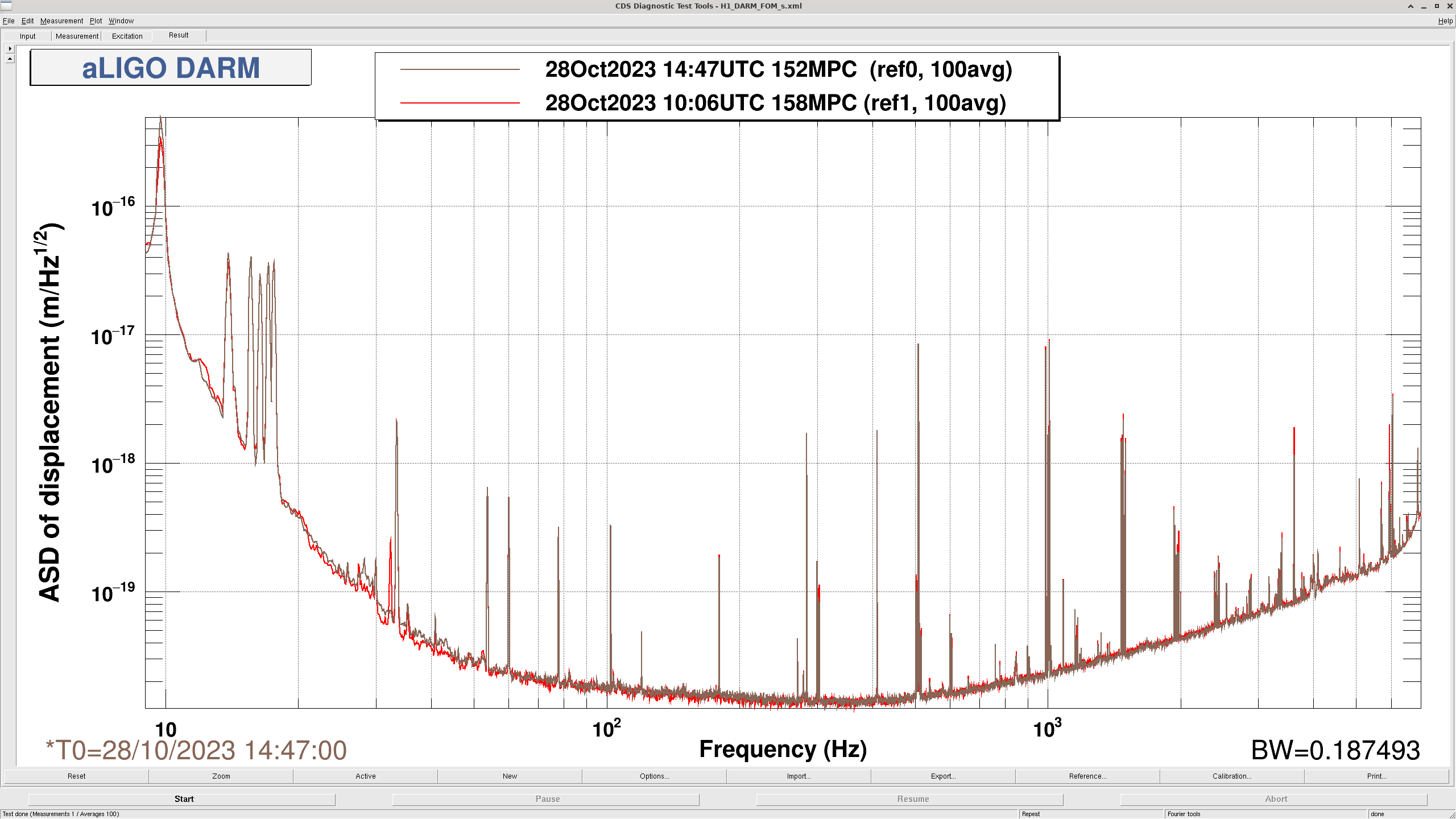
- High frequency noise seems higher than usual
- ITMY8 is slowly rising and has been during each lock today it seems, I may give the gain a sign change
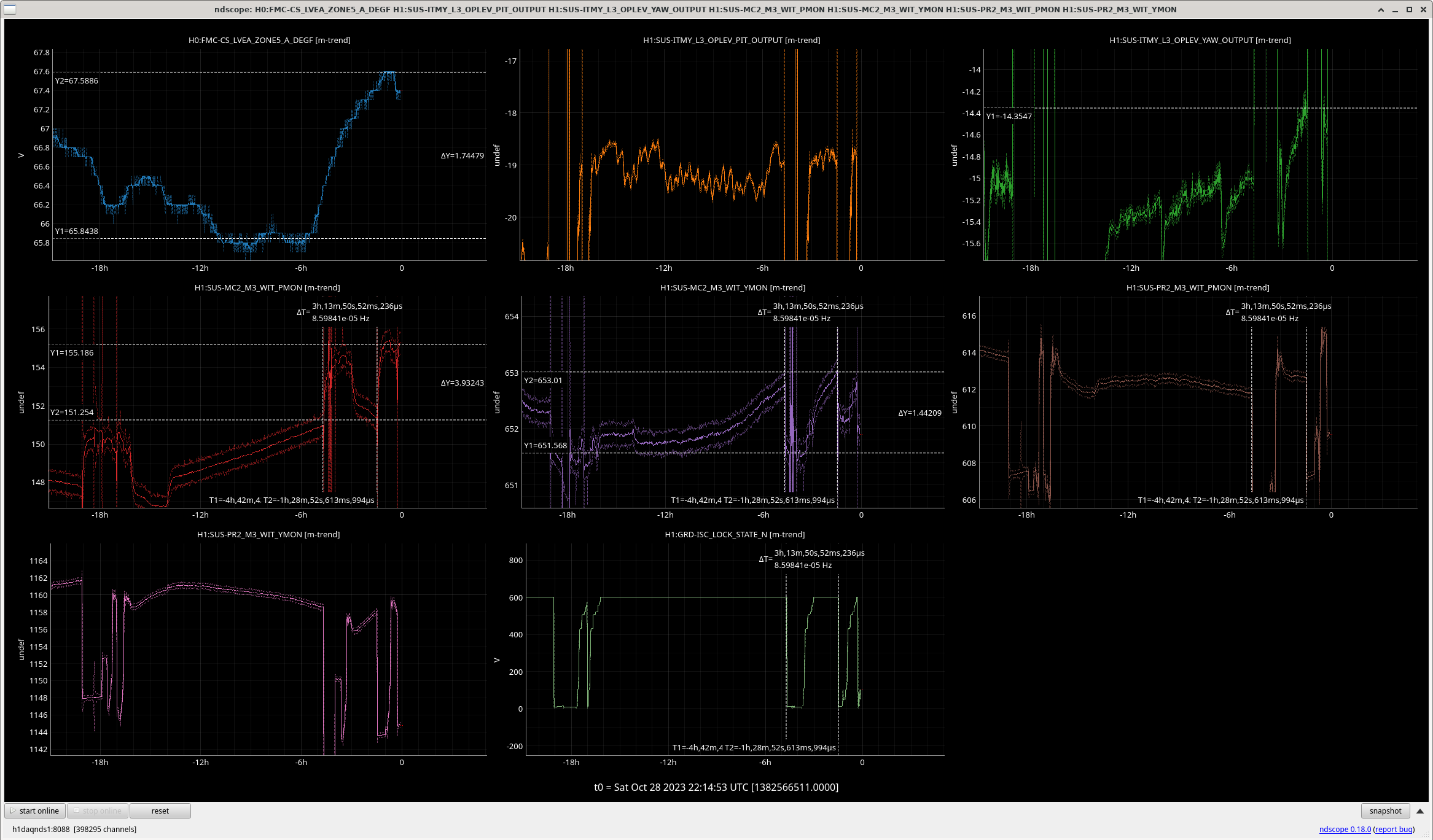


In observing at 23:14, the sign change on ITMY mode8's gain (-0.2 -> +0.2) also is working and bringing it down.