An attempt to measure the amount of misalignment that is currently present in the PSL-to-IMC coupling.
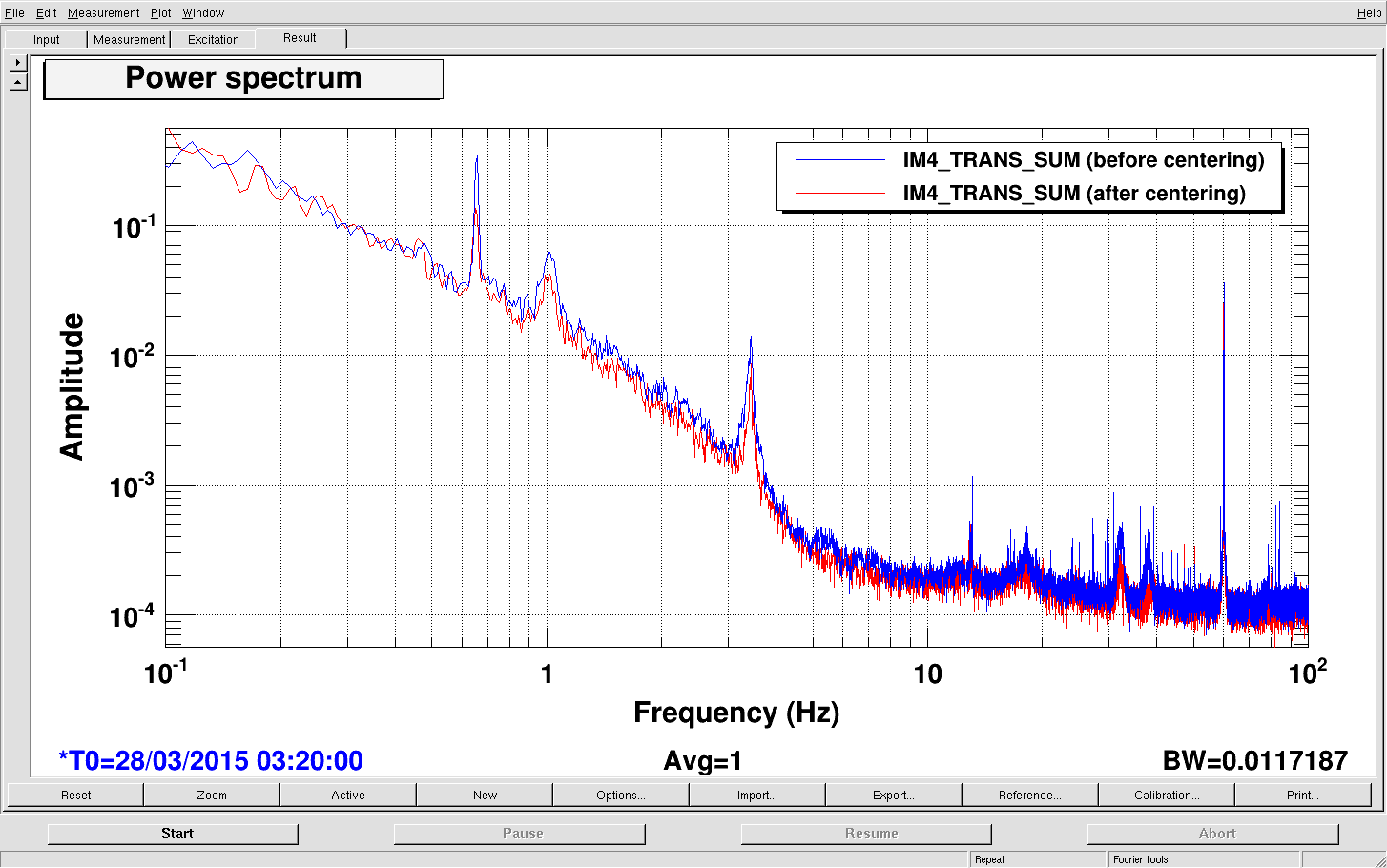
First I centered the direct reflection from the IMC onto the WFS A and WFS B sensors. There was about 30% reduction in the RIN. See attached png and xml files: IMC_jitter_centering.*
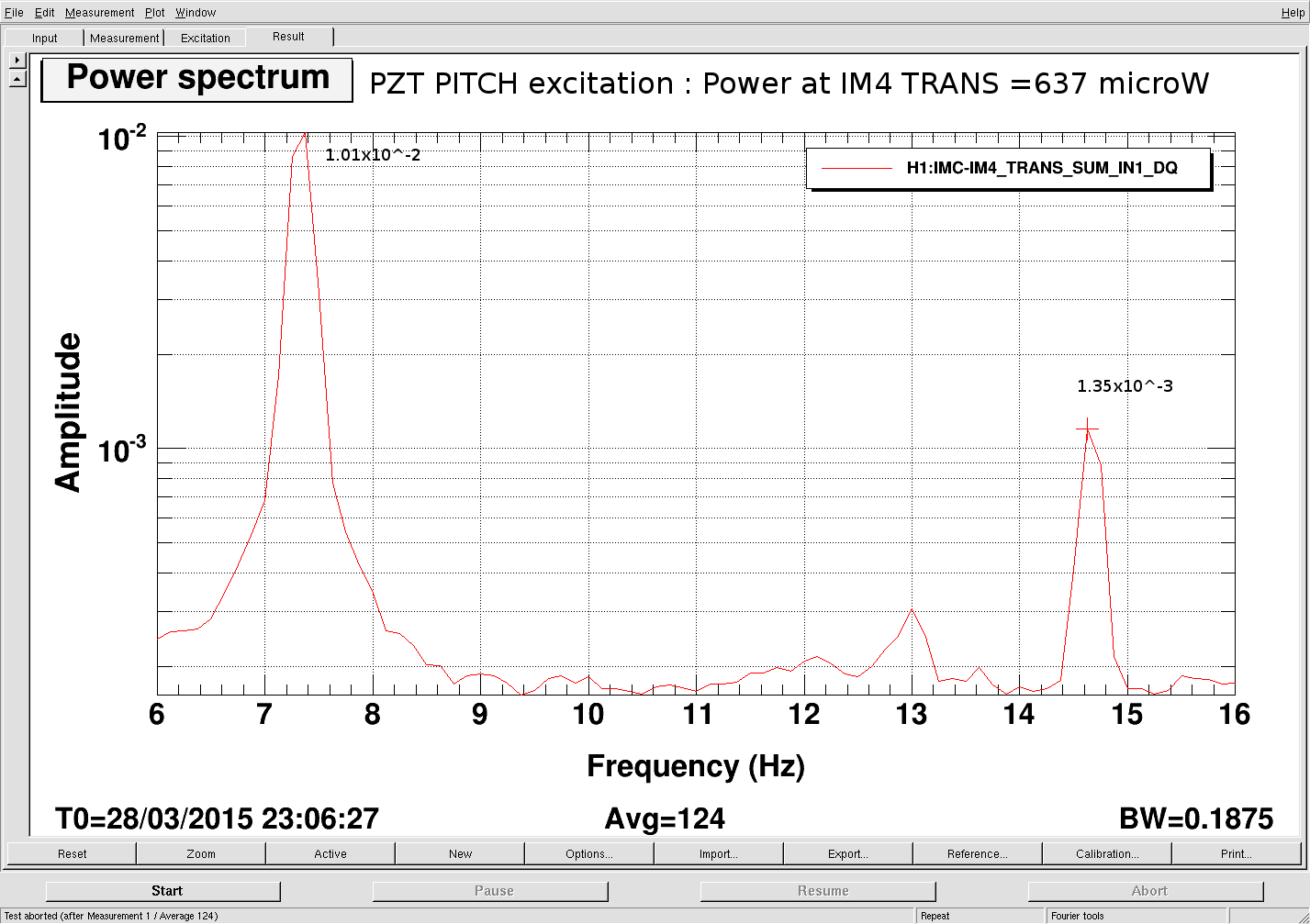
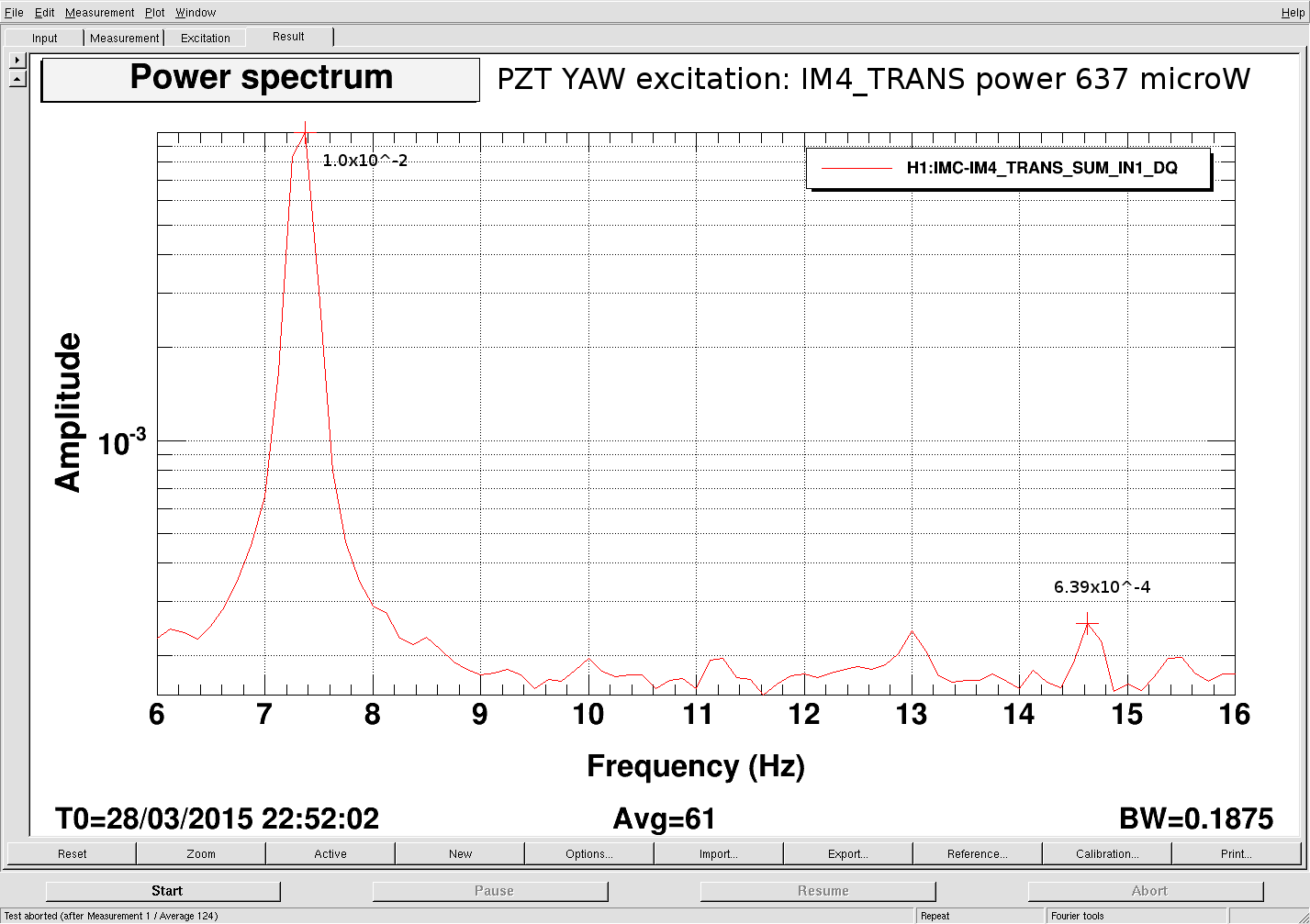
Next, I injected an excitation in to the PSL_PZT pitch and yaw at 7.33 Hz . I then took a PSD of the IM4_TRANS_SUM signal to measure the power fluctuations in at 7.33 Hz and 14.66 Hz (P1f and P2f) respectively.
Attached files show these peaks in the IM4_TRANS_SUM spectra. Attached also are the xml files which have the data and an excel file which has the computation of the amount of misalignment.
In summary:
1) Pitch misalignment is 0.6% of the IMC cavity beam divergence
2) Yaw misaligment is 1.2% of the IMC cavity beam divergence.
An attempt to see how the misalignment could have arisen:
I tried to vary several offsets to see whether this coupling from jitter to RIN could be changed. The ones I tried are
a) Common mode offset in the MC servo board: To see if a length offset is causing this H1:IMC-REFL_SERVO_COMOFS
b) Slow offset in the MC servo board H1:IMC-REFL_SERVO_SLOWOFS
c) Slow out offset in the MC servo board H1:IMC-REFL_SERVO_SLOWOUTOFS
d) DOF1 to DOF3 offsets in both both pitch and yaw in the MC WFS servo loops.
None of these by themselves had a significant impact on the jitter to RIN coupling. More investigation required.
And now for those nay sayers :-) Things I did not do!!
1) I returned all offsets to where they were.
2) The MC2 spot is centered and the IM4_TRANS spot has not moved from before to after my WFS centering => output beam has not shifted
3) The WFS outputs were not off loaded: the IMC alignment slider values have remained the same
4) No other Pico motors other than that of IMC WFS A and IMC WFS B were touched.
So in essence if something broke, its not coz of me!! :-p