Sheila, Keita,
Summary:
We have switched DARM control back to ETMX for ESD, PUM and UIM, and we have reshaped the UIM filters to make the cross over of the UIM with the rest of the DARM loop more stable.
Details:
We used ETMY L1+L2 + ETMX ESD as our DARM actuator for most of the fall, but in early January a scattering problem appeared in EY which caused us to move the DARM actuator to ETMX completely 46329. Last Friday the ETMX configuration stopped working, 46751, so we have been using the split actuator this week. We wanted to move the DARM actuator back to avoid possible scattering problems, because the calibration team has been working to calibrate EX, and we want to do this before retuning the LSC feedforwards.
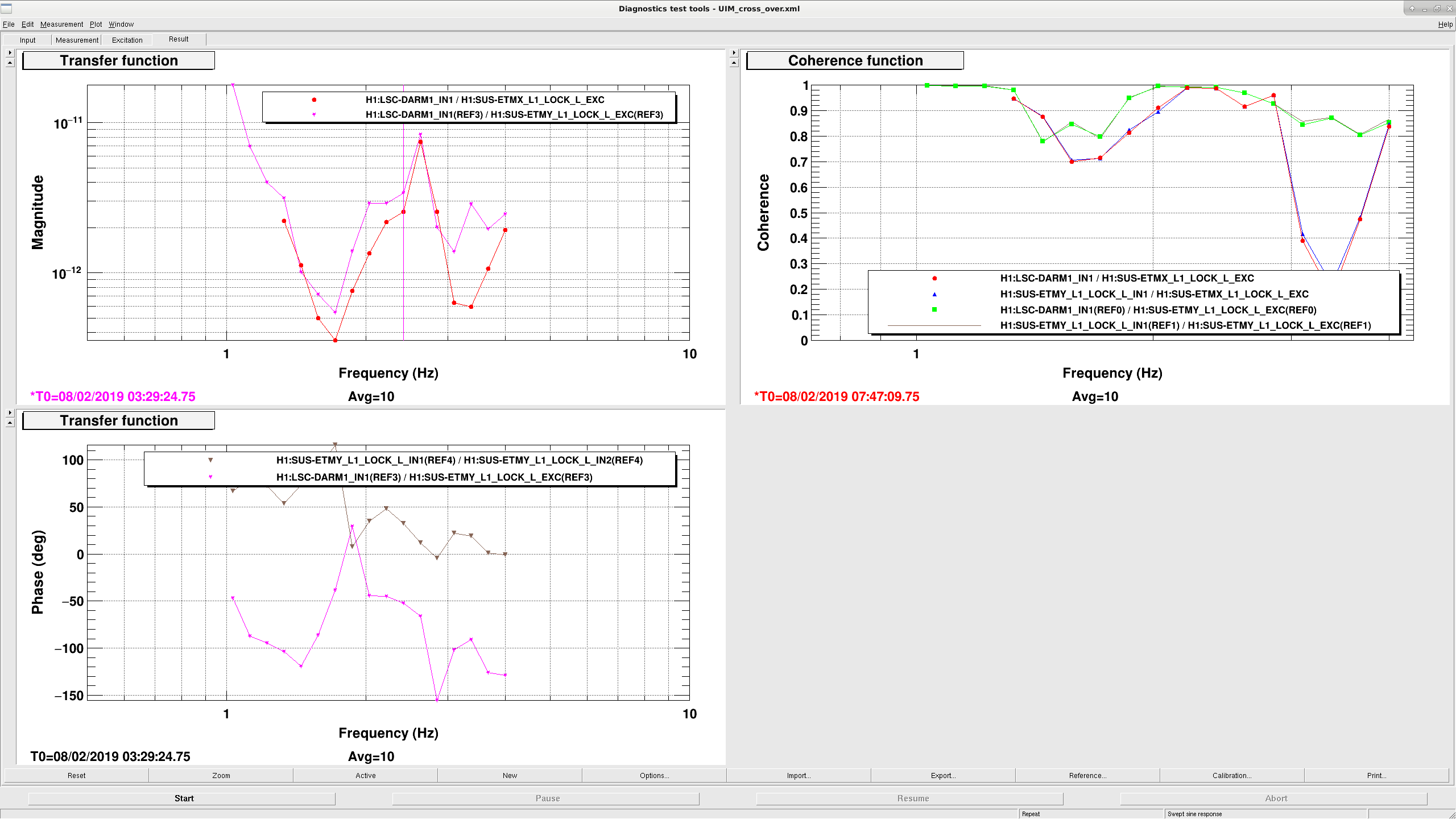
Last Friday when we were trying to switch from EY to EX, we measured the gain of the ESDs to DARM and the PUMs to DARM, and they were well matched between EX and EY. The attached screenshot shows a comparison of the response of DARM to UIM drive for ETMX and ETMY that we made last night. These were taken with a gain of 0.4 in L1LOCK L for ETMX and 0.6 for ETMY, which was based on an old measurement of the relative strengths (from before the ETMs were replaced). This shows that with these old relative gains, we were using 25% too low a gain for the ETMX UIM offloading compared to ETMY. Instead of 0.4 for ETMX we should have been using 0.53 as a L1 LOCK gain.
The first two PDFs show a model of the DARM loop and its crossovers as it has been, compared with measurements taken in the actuator configuration used this week (ETMX ESD, ETMY UIM and PUM). These actuator models are taken from the CAL front end filters, Evan Goetz helped me to compare parts of this to pyDARM.
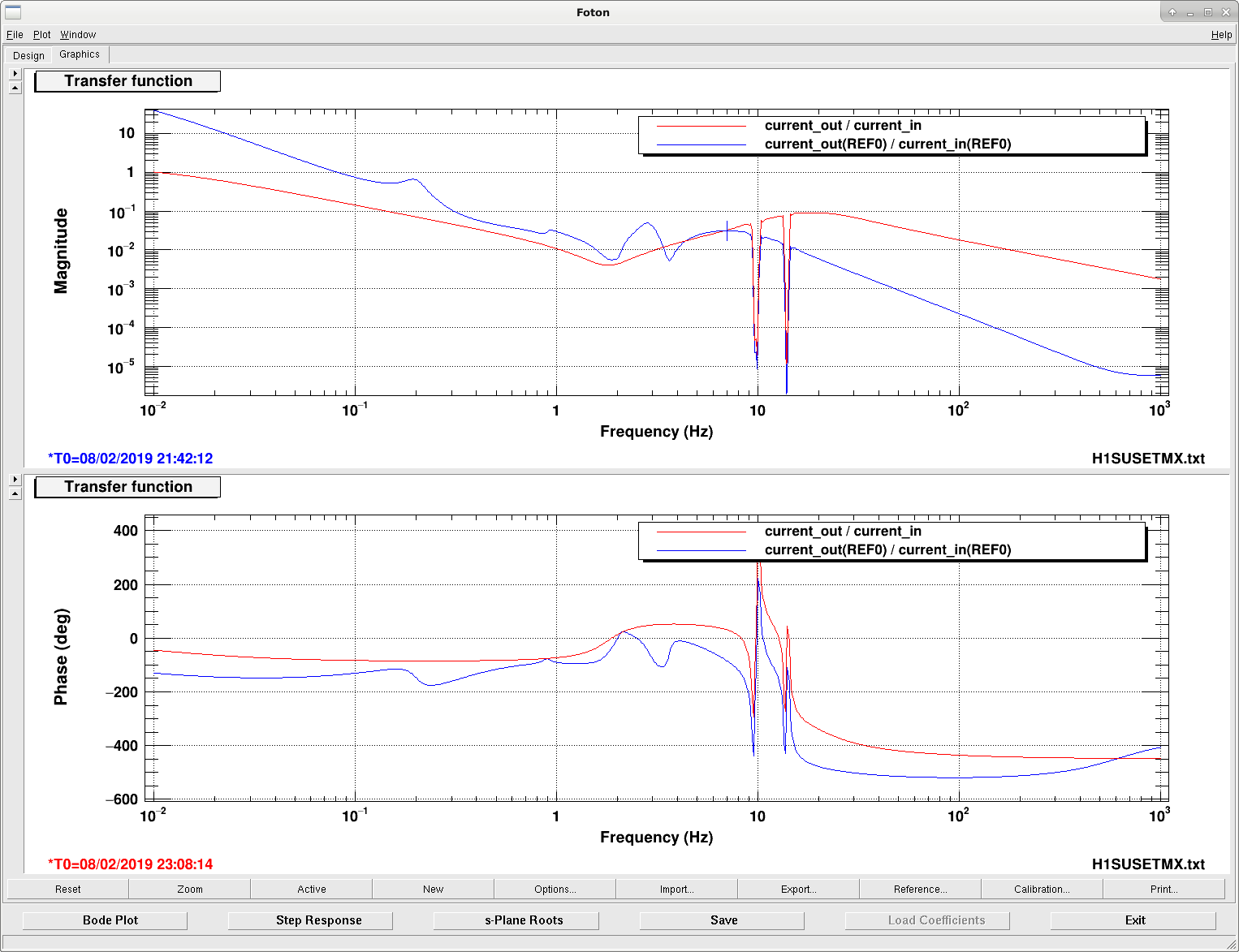
The crossover measurements are taken at L2 LOCK L IN1/IN2 and L1 lock in2/in1. If you think of the loop as a common path C, slow path S and fast path F, these measurements are of CS/(1-CF) which is approximately -S/F We would like to avoid the situation where the two actuators are canceling each other's motion which is approximately the same as staying away from a unity gain point with 0 phase in this measurement. You can see in the open loop model that the gain of the UIM and PUM paths are nearly equal from about 0.5 Hz to almost 3 Hz, which is not ideal, and that they are close to being out of phase. We have know that this wasn't ideal for a while, but until last Friday we weren't having much trouble with the stability of the DARM loop so we have left it alone. The second attached plot shows a comparison of the old UIM lock L filter to a new one that Keita and I made today. We replaced the UIM filter with this filter, and increased it's gain by a factor of 2 so that the gain setting for the L1 lock is now 1.06. The 3rd and 4th attached PDFs show the DARM model with the new filter and gain for the uim. The UIM crossover is now more stable. The model underestimated the gain of the UIM path when it was locked on ETMY and over estimates the gain on ETMX, which we don't understand, but there is room to increase the UIM gain.
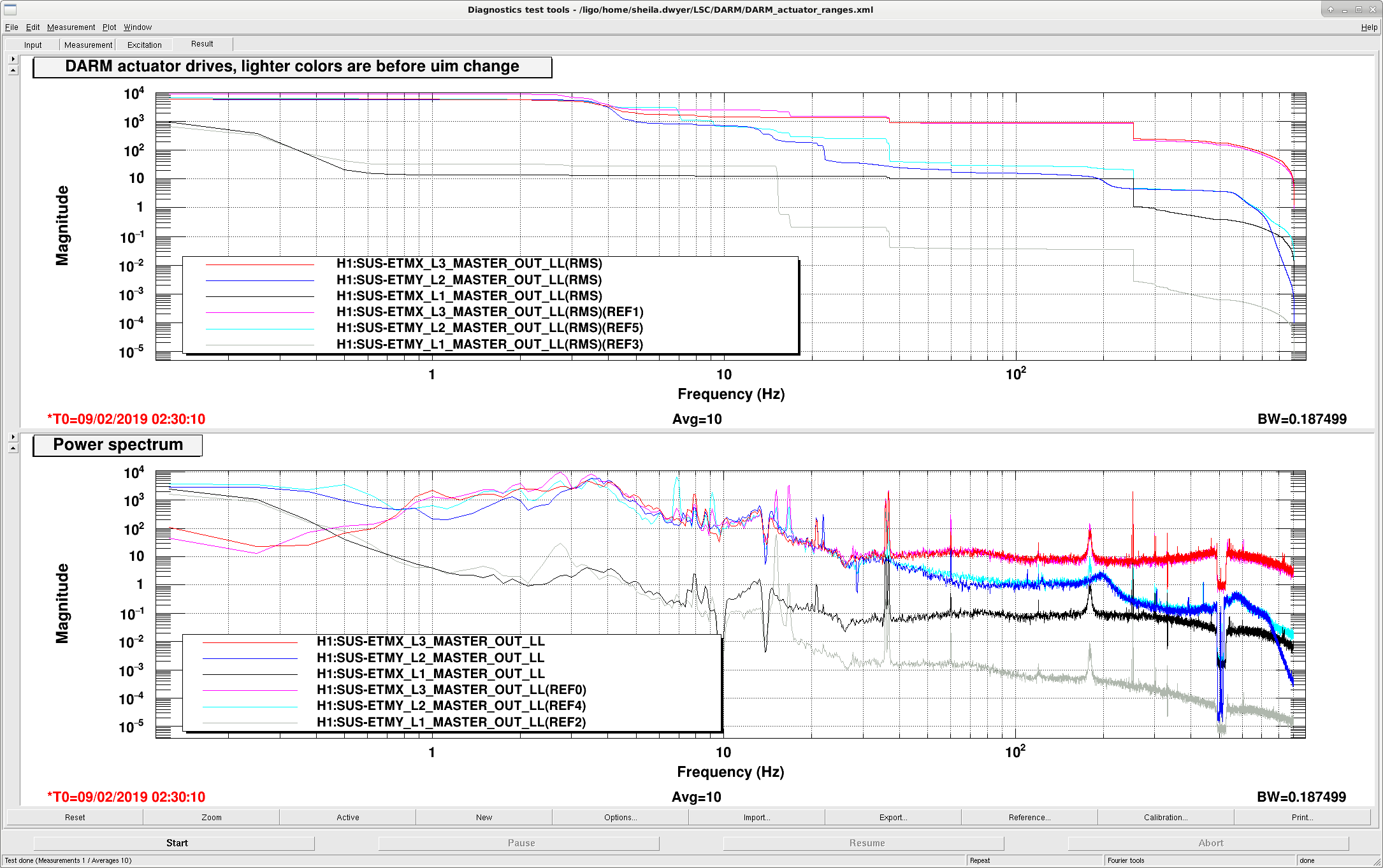
The third attached screenshot shows the rms drive to the suspensions before and after this change; we have room to increase the UIM gain more.
These changes are in the guardian now. If there are any problems in the LOWNOISE_ESD_ETMX state, you can reset the use_EX_L1L2 flag back to False.