thomas.vo@LIGO.ORG - posted 17:16, Tuesday 28 May 2013 - last comment - 13:22, Wednesday 29 May 2013(6522)
PR3 Optical Lever Calibration
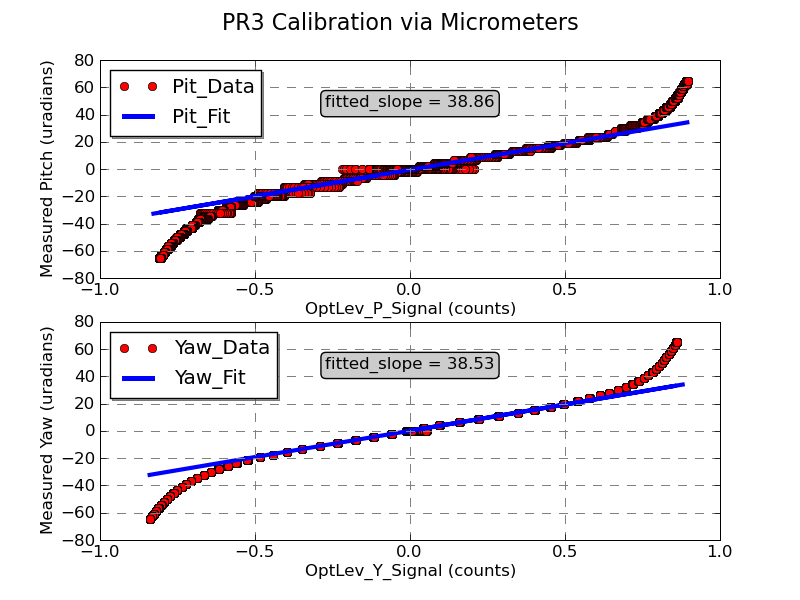
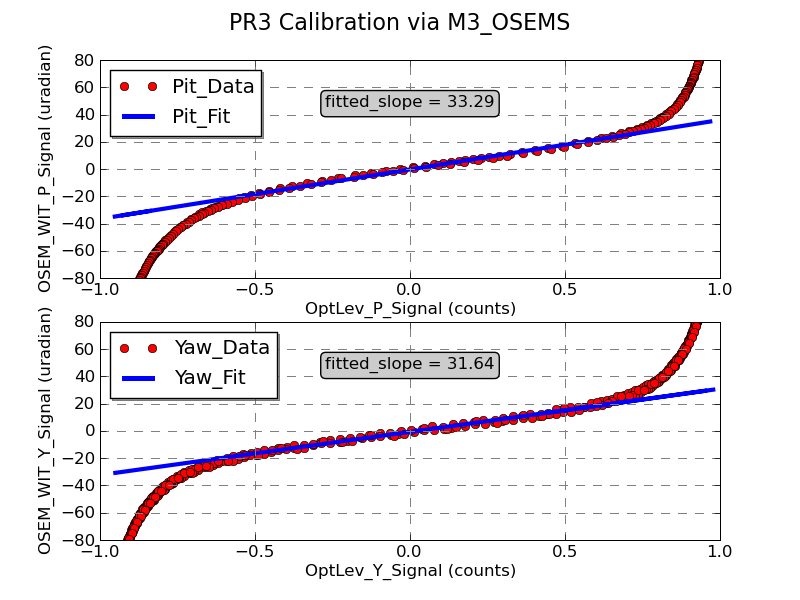
The orientation of the QPD for PR3 is: | 4 | 1 | | |---+---| | +PITCH <--- +YAW | 2 | 3 | v This is different than the test mass optical levers because mechanical interferences do not allow us to mount the QPD in a consistent orientation. The OL2EUL matrix is set up to reflect the SUS convention for pitch and yaw as shown above. I took measurements two separate ways in order to map out the linear response of this optical lever: 1) The first was the standard usage of the micrometer on the stepper-motor which the QPD is mounted to and I was able to correlate the pitch and yaw signal on the QPD to what we would see in the tilt of the optic. 2) The second method is the use of the actuators and OSEMS on the suspension and correlate the readings on the QPD and the readings on the OSEMS. PR3 is one of the few optics which allow us to make this measurement since there are OSEMS on the bottom stage that directly measure the main optic. Graphs are attached to show the results: Micrometer_measurements: slope_p = 38.86 slope_y = 38.53 OSEM_measurements: slope_p = 33.29 slope_y = 31.64 Comparing the two: Pitch: 100*(38.86 - 33.29)/38.83 = 14.345% Yaw: 100*(38.53 - 31.64)/38.53 = 17.882% Although both of these methods yield similar results, I'm not sure what uncertainties would be found in exploring the shadow sensors and the actuators. Calculating the uncertainties explicitly with the manufacturer's tolerance and estimating the lever arm uncertainty, I get the uncertainty of using the micrometer to measure angular displacment at 2.5%. Note: PR3's optical lever receiver is almost directly above the transmitter (zeemax says it's 89.99 degrees from the horizontal line); this could explain why measurements in pitch agree much better than yaw. All in all I have added the gain to the MEDMs: - H1SUS-PR3_M3_OPLEV_PITCH_GAIN = 38.86 - H1SUS-PR3_M3_OPLEV_YAW_GAIN = 38.53 All measurements were done with HEPI locked and the ISI damping with the ST1 DAMP loops. Suspension damping was also turned on at the top M1 stage, for the actuation to get the OSEM measurements, I used the top mass actuators as well. As a bonus treat, I've attached a calibrated spectra of the optical levers and the OSEMS.
Images attached to this report
Non-image files attached to this report

Comments related to this report
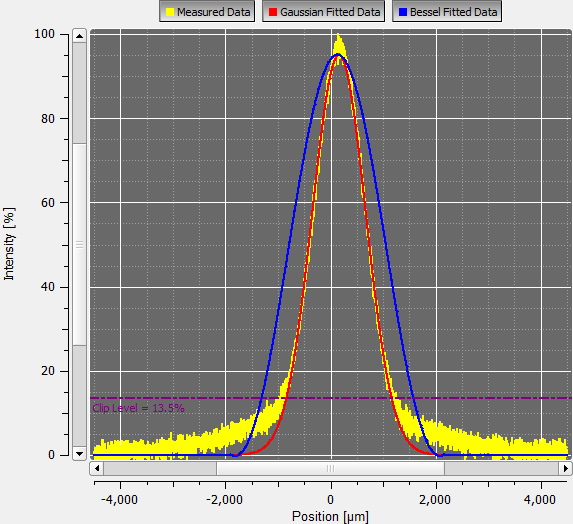
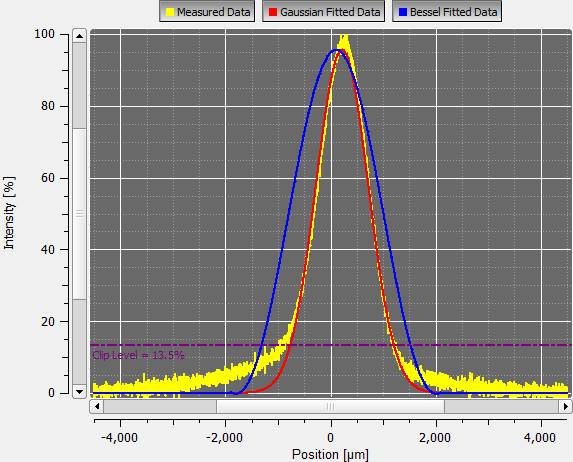
Here is also a beam profile attached, nominal beam width = 2 mm Gaussian_fit_X = 96.61 Gaussian_fit_Y = 96.56 Gaussian_diameter_X = 2.04 mm Gaussian_diameter_Y = 1.98 mm Note: Taken with Thorlabs BP209-VIS
Images attached to this comment