Ryan C, Austin, Oli, Jeff K, Betsy, Dave, Eric, Fil, RAL/CIT team and Rahul
Happy to report that we have finished the assembly of our first A+ HAM Relay Triple Suspension (HRTS) (freestanding version) with Class A parts as per the assembly procedure described in D1900449_V7. HRTS is a new small scale triple pendulum suspension required for Balanced Homodyne Detection system. This is first of the twelve suspensions we have to deliver for both the sites (six each for LHO and LLO, which includes one spare per site) for observing run O5.
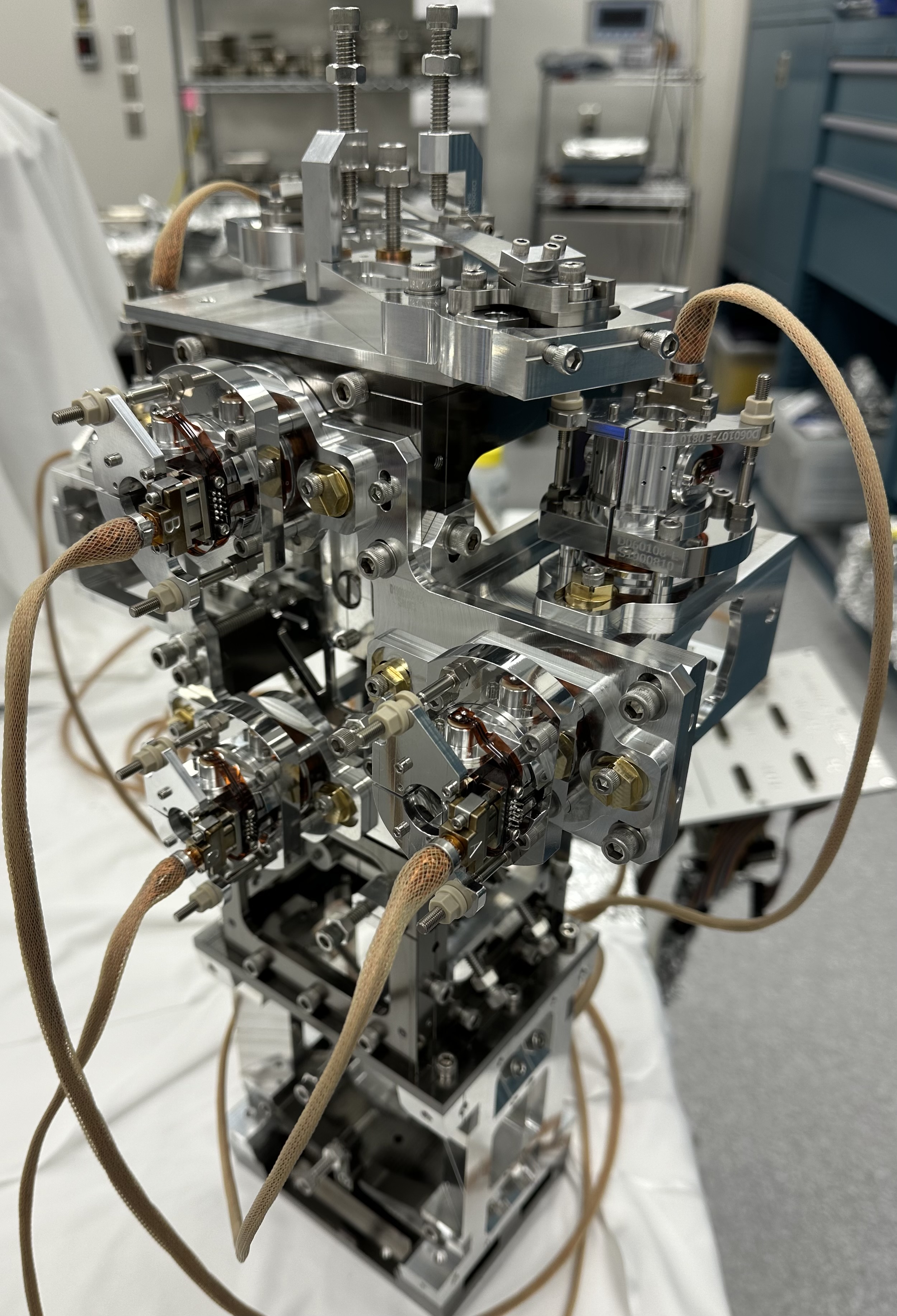
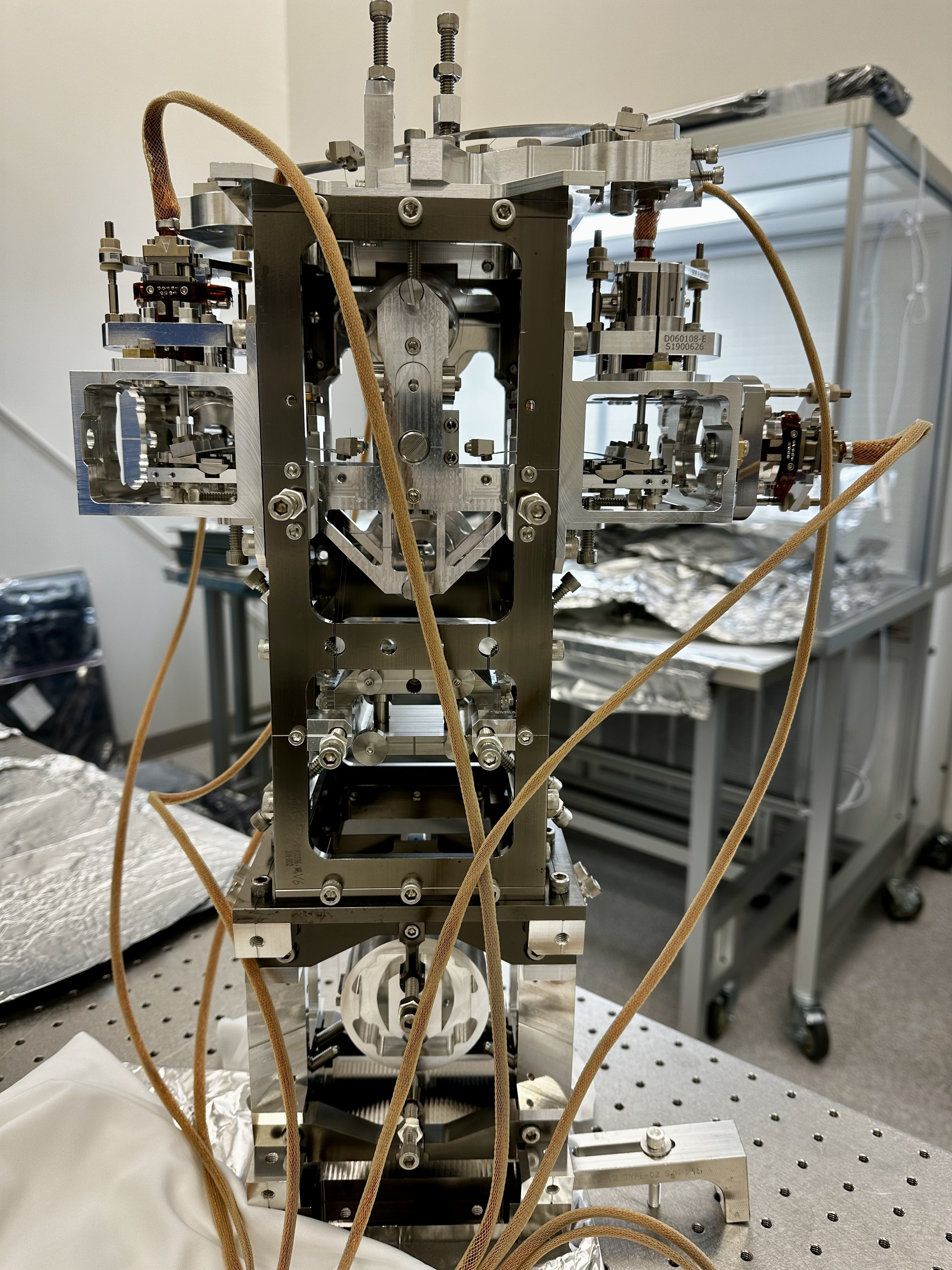
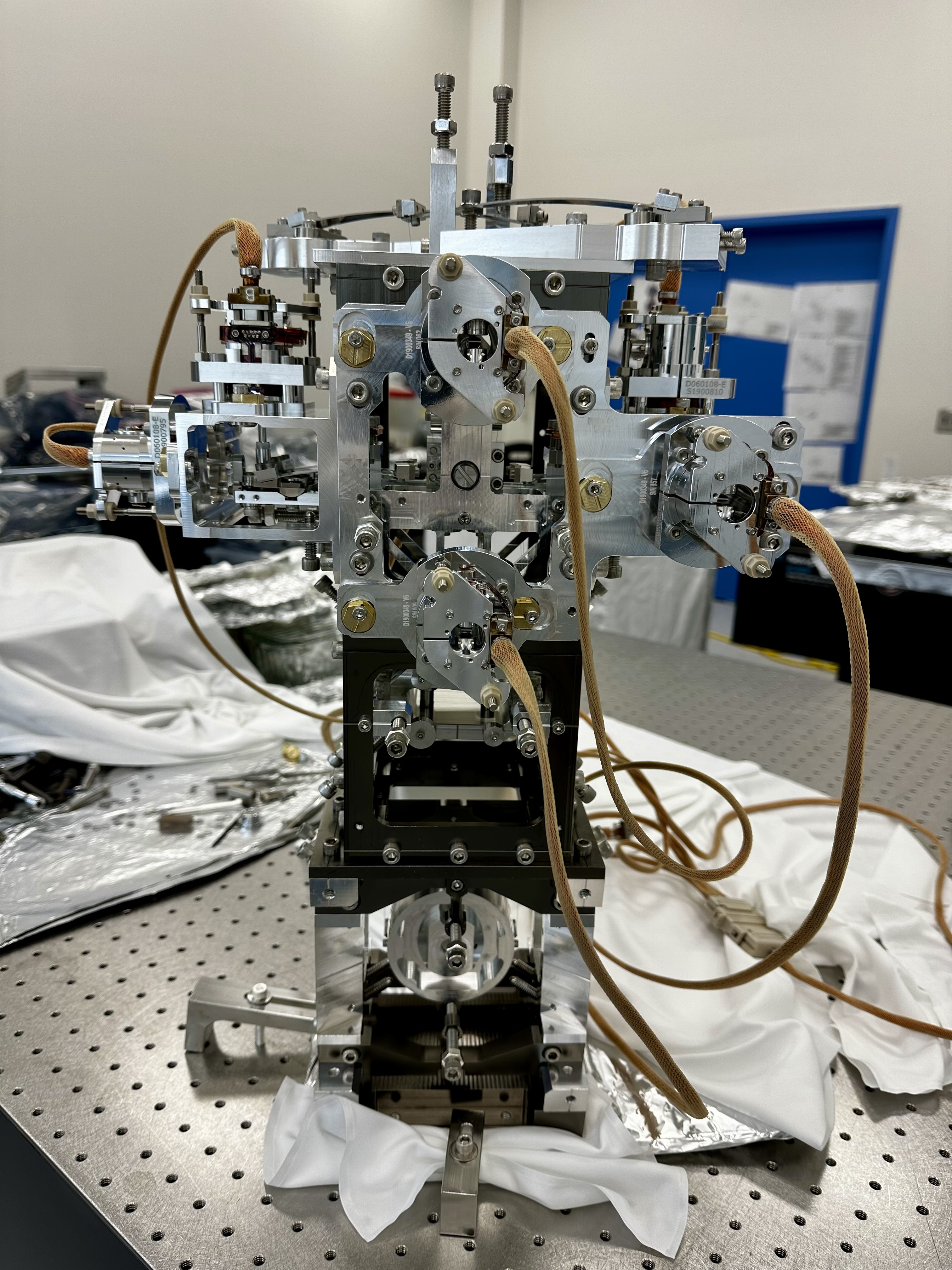
HRTS comes in two configuration, freestanding (table mounted which is discussed in this alog) and suspended (to be built, will be attached to the new beamsplitter suspension BBSS). The details about the assembly and characterization along with pictures are discussed below,
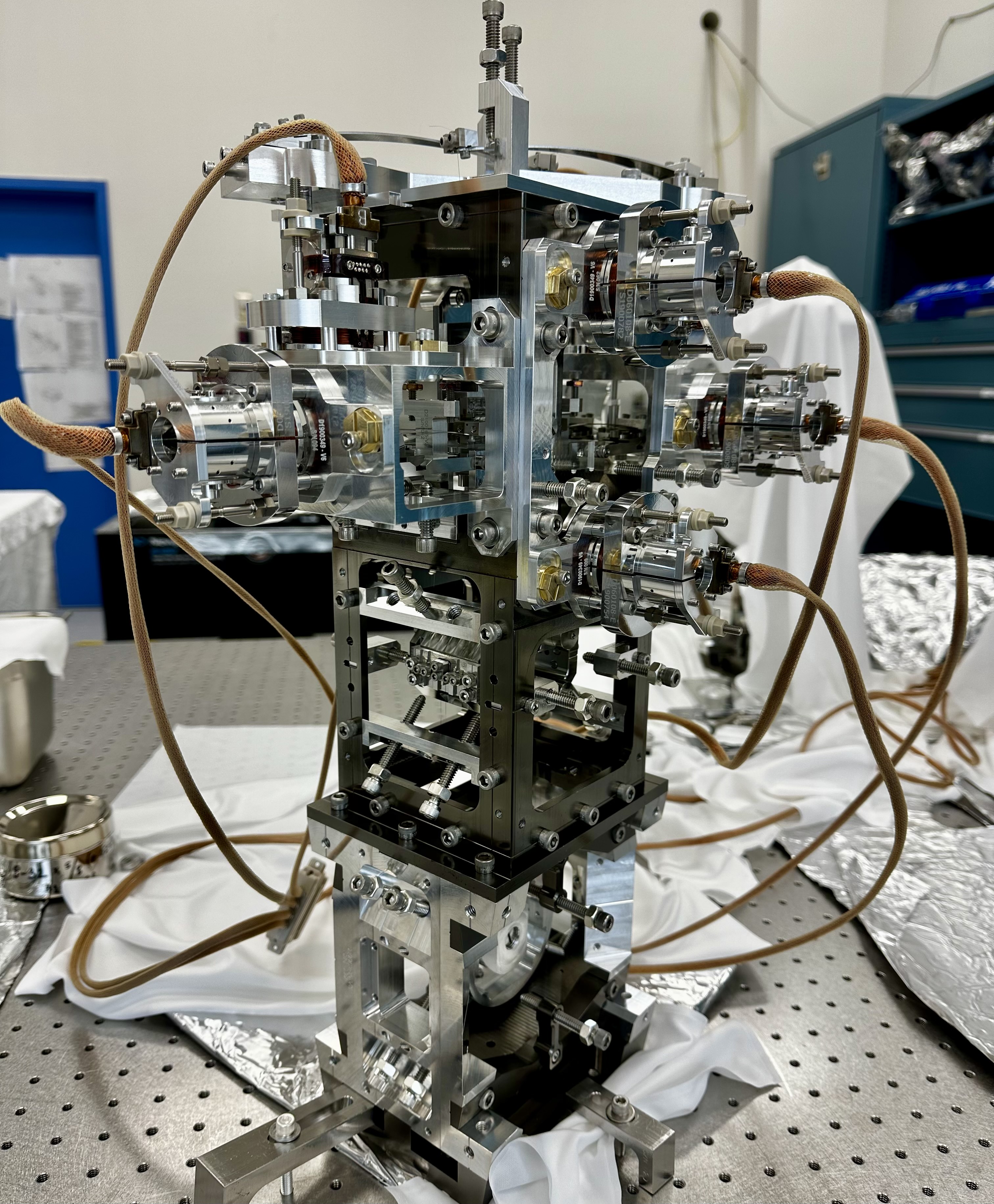
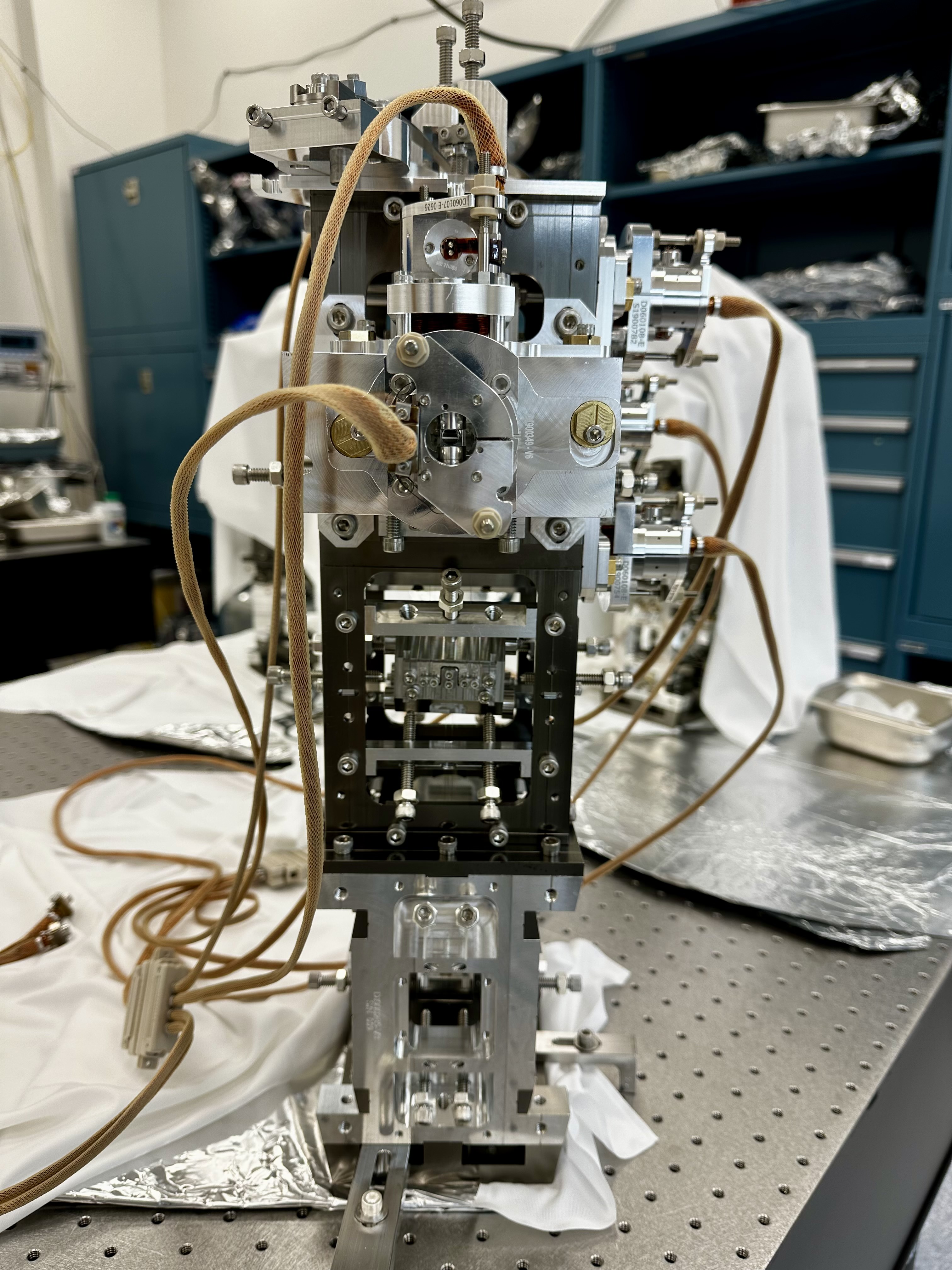
Attachment01 shows the AR side of the SUS, attachment02 shows the HR side. For isometric view, please see attachment03.
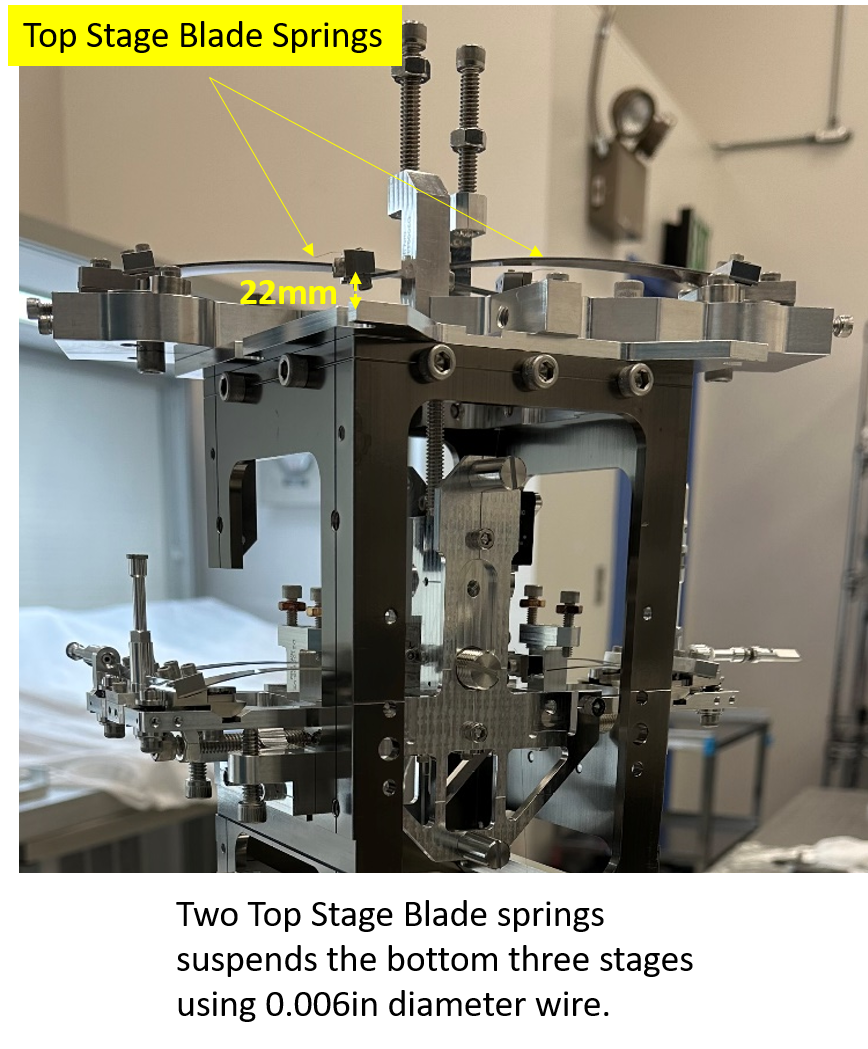
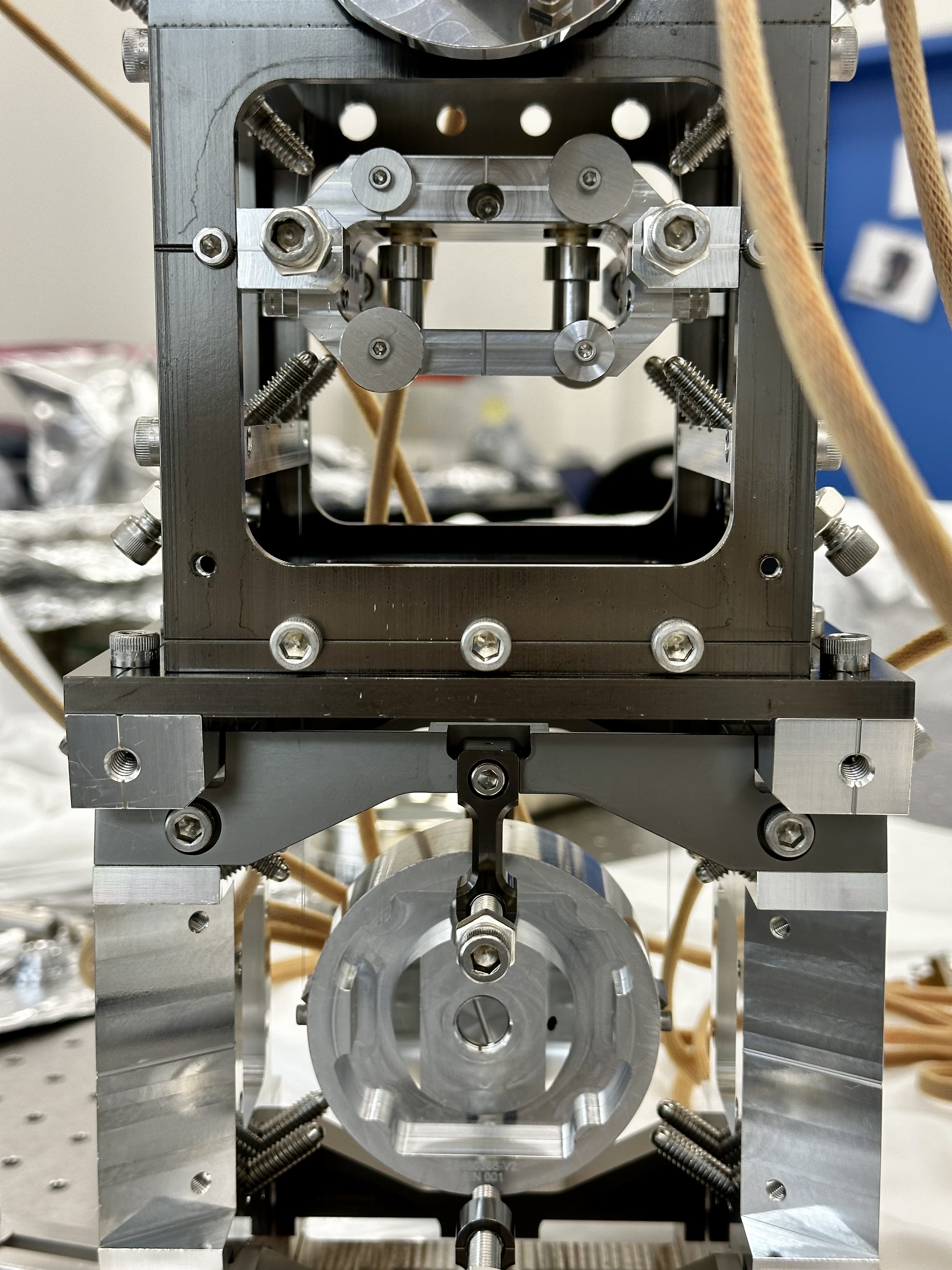
This multistage suspension (three suspended stages) has blade springs at the upper stage and top mass for vertical isolation. There are two blade springs at the very top stage (D2100389) as shown in the picture here. The blade spring are mounted on spring loaded clamps which can be adjusted for Yaw dof and height (sus point). The two wires (diameter 0.006in) from the two top stage blade springs suspends the Top Mass (D2100362) which has four blade springs, as shown here.
Wire diameters are as follows:-
Top Stage to Top Mass = 0.006in, length 115mm
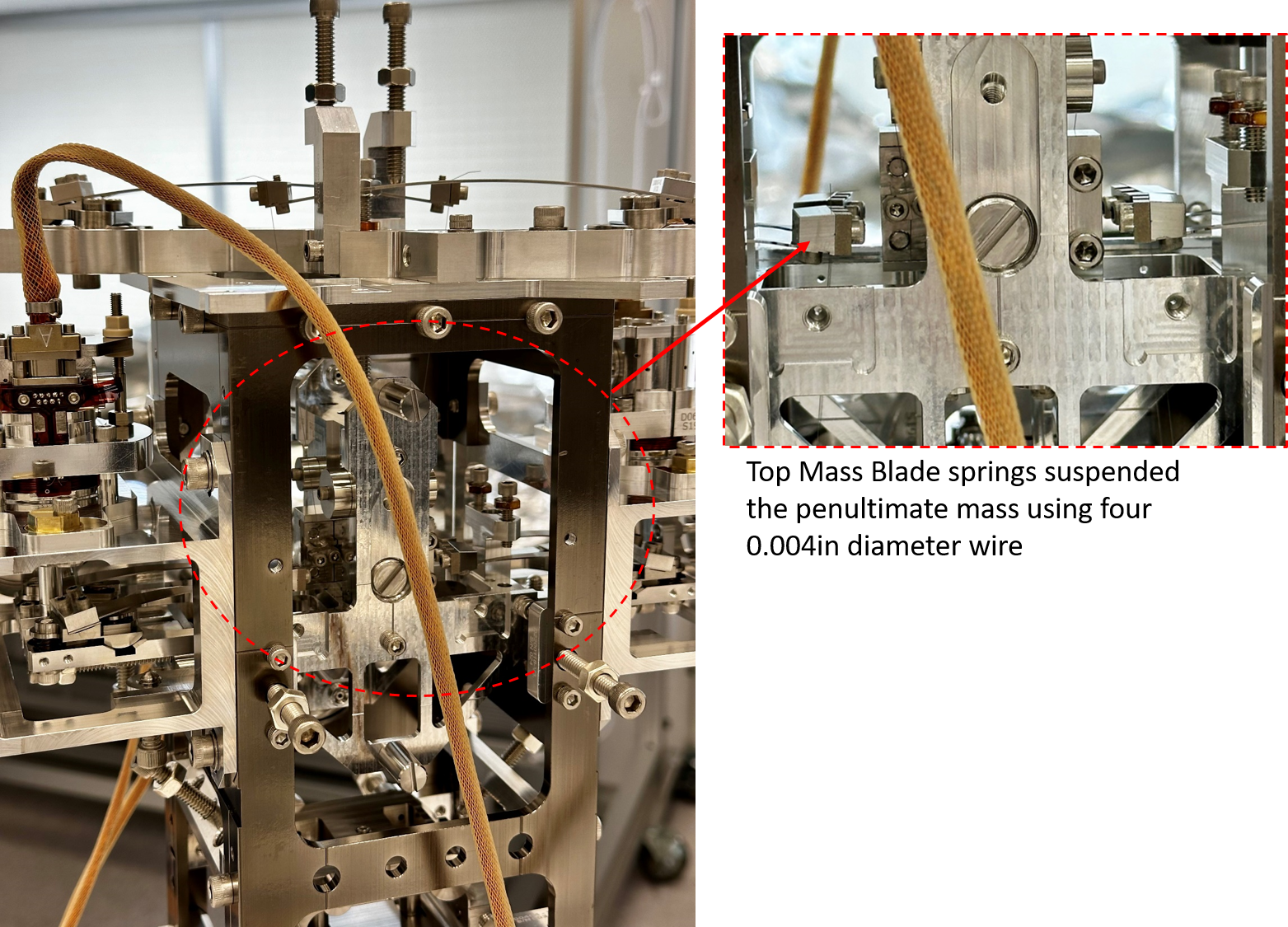
Top Mass to Penultimate Mass = 0.004in, length 115mm
Penultimate Mass to Optic = 0.0025in, length 160mm
Suspended masses (as per specifications):-
Top Mass = 750gm
Penultimate mass = 802gm
Dummy optic = 300gm
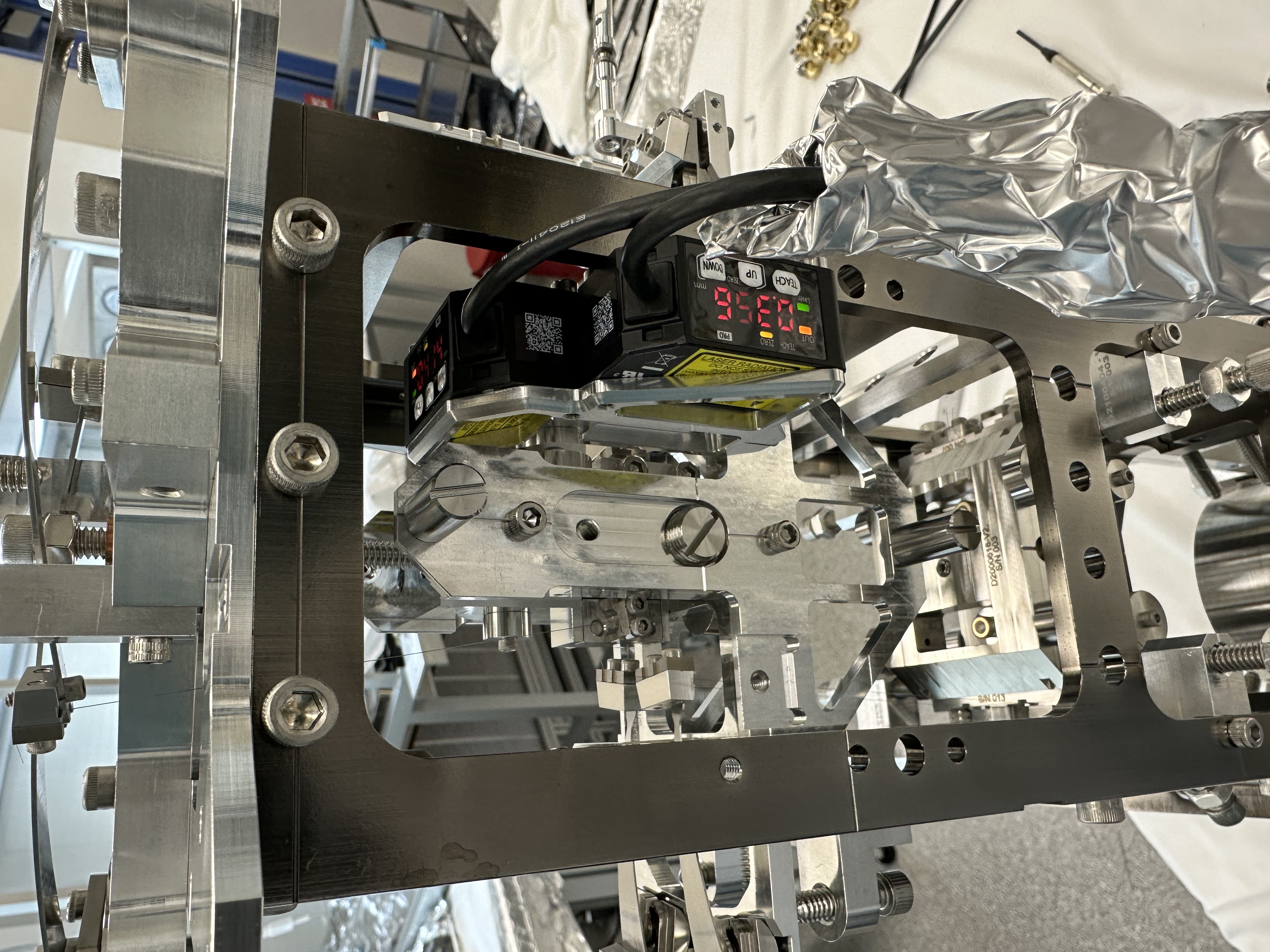
The Top Mass blade spring clamps are spring loaded (just like the top stage) which gives them the ability to adjust for blade tip height. We use a tool (T2400063) provided by the RAL UK team for measuring (while adjusting) the blade spring tip height (this tool can only be used for this stage) - as shown in this picture. A calibration block has also been provided for calibrating the tool before using it. The penultimate mass is suspended from the top mass blade springs using four wires of diameter 0.004in. The Optic (dummy optic for now) is suspended using two wires in a loop from the penultimate mass - see picture here. All the wires were pulled using their dedicated wire jigs, which defines the wire length and position within the wire clamps.
We had some issues with wire installation procedure (wires at the top mass stage kinks/breaking too often during handling). After discussions with colleagues here and at RAL we now have a new tool (currently under fabrication) which will aide in wire installation procedure. Also, with practice we are getting better at handling wires of this thickness (thinner than human hair).
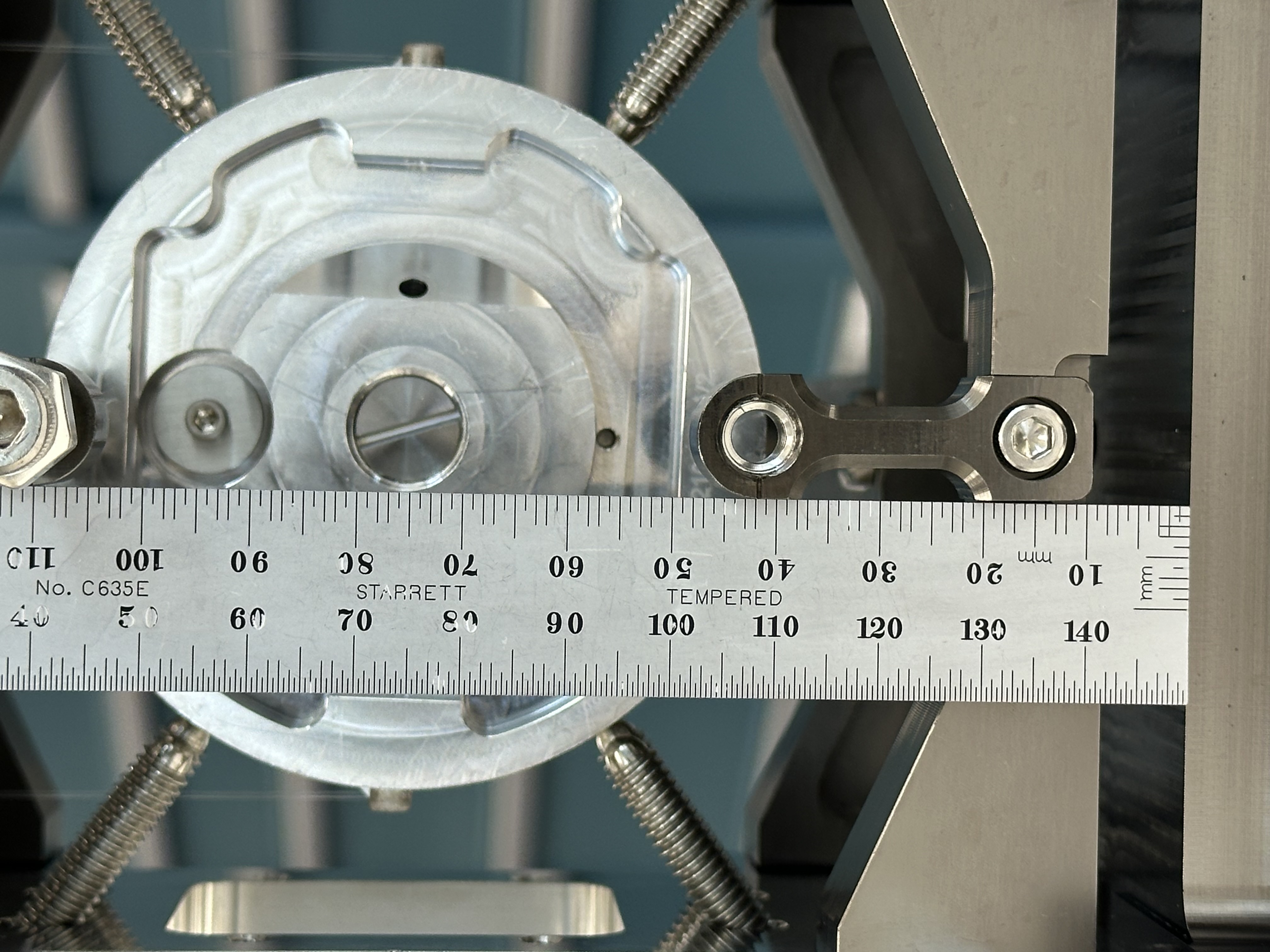
Once the assembly was complete, we measured and adjusted the height of the top stage blade springs, which comes out to be 22.5mm from the top plate. This adjustment was made to lower the entire chain such that each stage aligns with their respective position, as marked on the frame. The bottom edge of the dummy optic is now approximately suspended at 40.5mm from bottom of the frame (s/n 002) - which as per the design specifications. The other degrees of freedom like pitch, yaw, roll also looks respectable without any major adjustment, although we can further improve the pitch on penultimate mass (using balance mass and pitch adjuster mechanism provided at two stages).
HRTS is controlled using six BOSEMs, their flag/magnet attachment are as per the controls arrangement document E2300341. After attaching the BOSEMs and with little adjustment all six flags looked nicely centered.
Before centering them we measured their Open Light Current (OLC) and calculated the offsets and gains which are as follows,
|
BOSEM D060106-E (s/n) |
OLC |
Offsets (-OLC/2) |
Gain (30,000/OLC) |
|
F1 (S1900810) |
26807 |
-13403.5 |
1.119 |
|
F2 (S1900795) |
31010 |
-15505 |
0.967 |
|
F3(S1900754) |
30165 |
-15082.5 |
0.994 |
|
LF(S1900809) |
29316 |
-14658 |
1.023 |
|
RT(S1900782) |
28820 |
-14410 |
1.040 |
|
SD(S1900626) |
26768 |
-13384 |
1.120 |
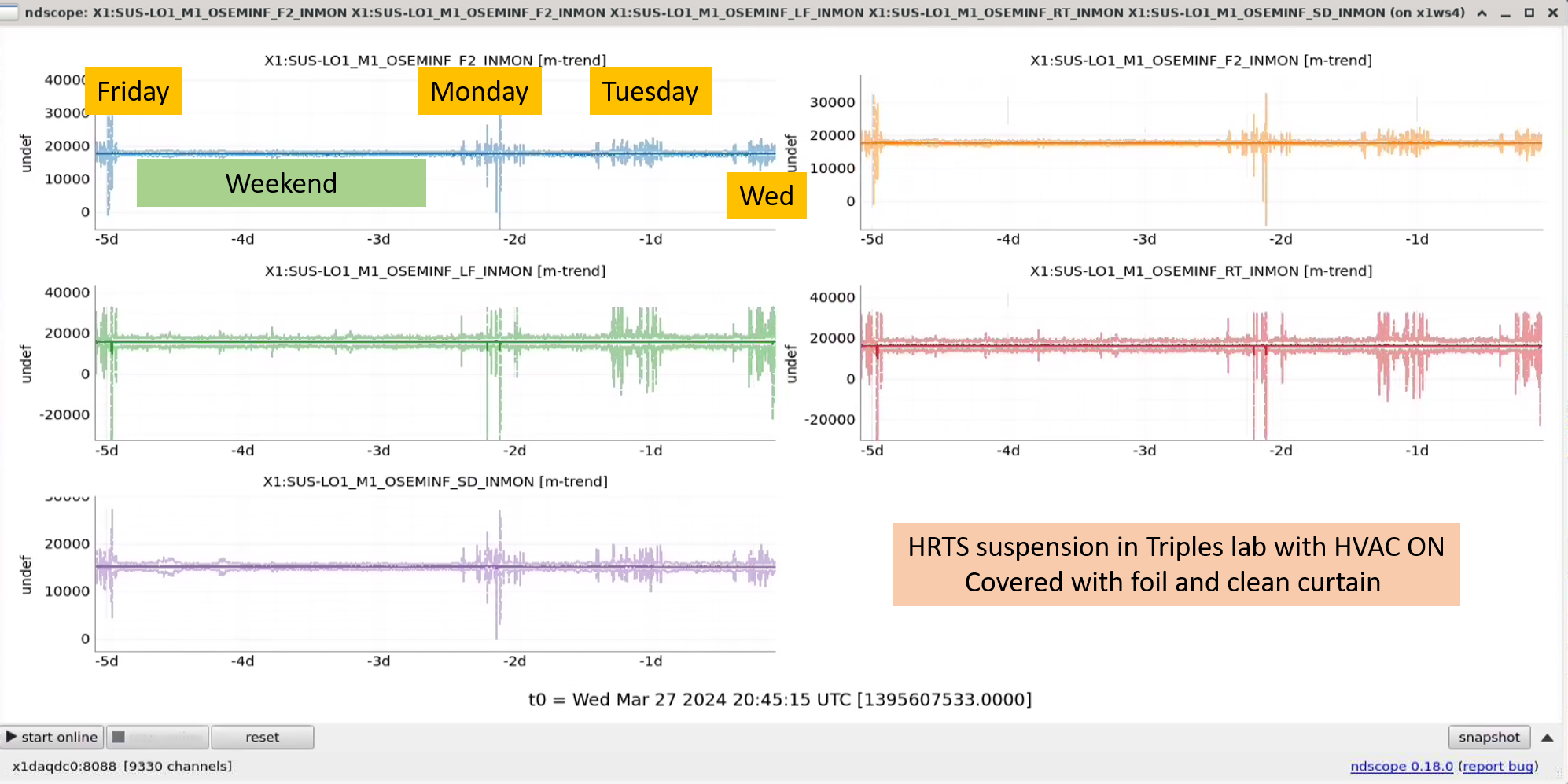
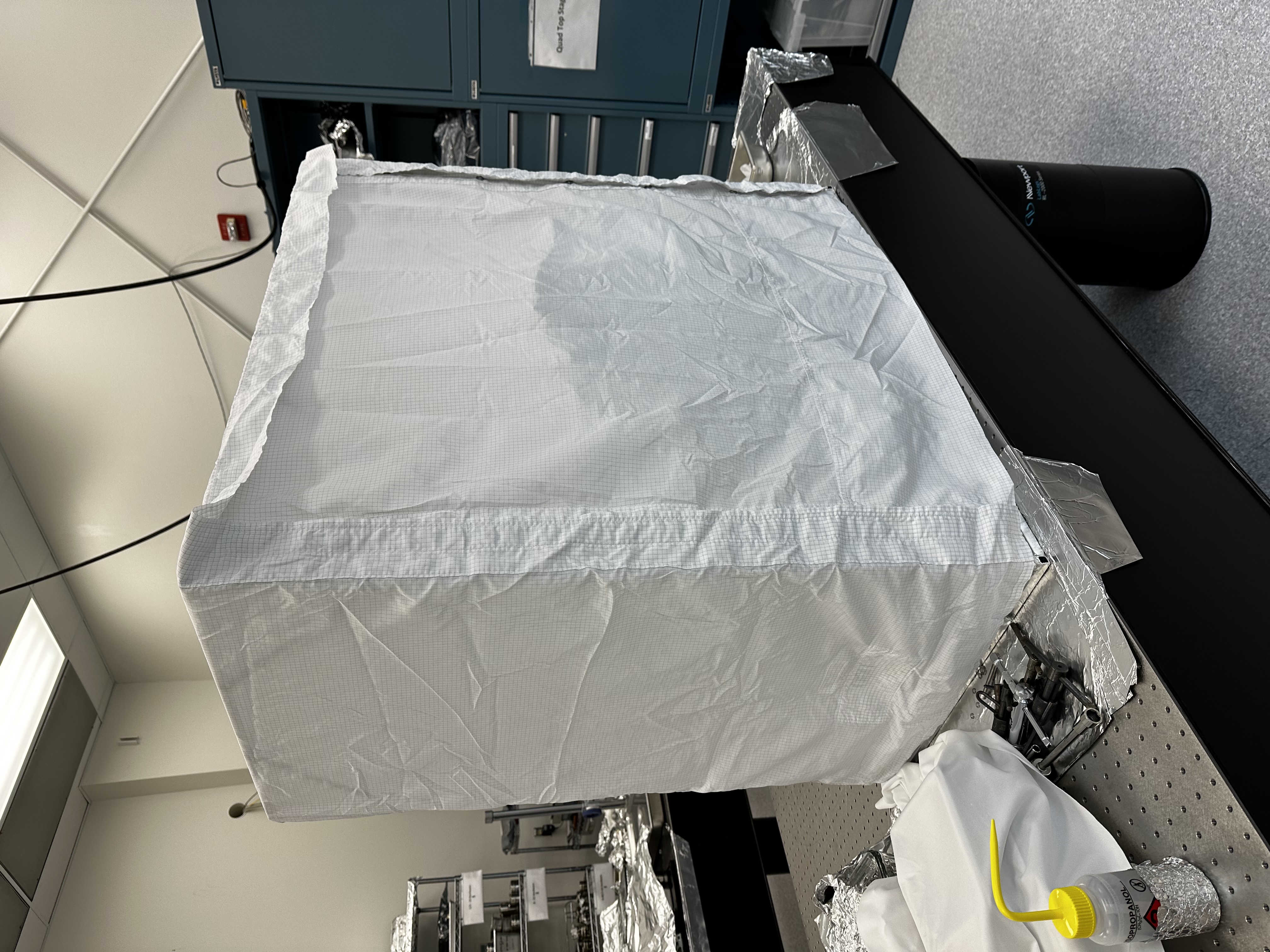
We have a dedicated test stand at the triples lab in the Stagings building, thanks to Fil, Eric and Dave. The hardware (power supply, satellite boxes, Triple Coil driver, IO, AA and AI chassis) can be seen in this picture. We also have a working MEDM screen for HRTS on X1 controls thanks to Jeff Kissel and Oli. Using this infrastructure we started testing out our suspension. The first challenge was too much vibration in the lab due to turbulent air, vibration due to building doors opening/closing etc. Our suspension is sitting on a heavy optical bench and we have also used a teflon sheet for absorbing some of the ground vibrations. However, since the turbulent air in the lab was too much for us to take any meaningful measurements, hence we covered the SUS in two layers of foil and then clean room cloth - as shown over here. We then exited the lab and it took 30mins or so for things to calm down (while HVACs in the lab are still running). Long story short, we took the first top to top transfer function measurements for HRTS and the plots are attached below. I am attaching the DTT plots as well as the ones processed in Matlab.
If you look at the DTT plots, the coherence is not too bad despite all the external vibrations leading to saturations (we have 18bit DAC). In Matlab we can compare our results against the model (Mathematica from M Barton, imported to Matlab). The Longitudinal (L),Transverse (T) and Yaw (Y) dof aligns nicely with the model, ie all peaks and magnitude looks good. Pitch (P) also has most of the peaks at right places (except a missing peak at 4.5Hz), and is off in magnitude which we are investigating. Vertical (V) is noisy (which is expected as the suspension can be easily excited in vertical motion) and has a cross-coupling from Roll (R) (at around 1.8Hz)? Roll (page8) looks the worst of all especially the shape and magnitude at frequency below 2Hz.
I am still fine tweaking the balancing of the suspension, further isolating it environmental noise and discussing with colleagues to take better measurements. In the meanwhile this is a decent start for us, eleven more to go.


Tagging EPO -- Rahul has new babies! This is the newest type of suspension -- and by far housing the smallest triple suspension. So cute!
Looking at the ndscope of the raw inmons from HRTS BOSEMs over a period of last 6 days, the weekends and evening times are nice and quiet and it gets noisy during business hours. LF and RT BOSEMs which corresponds to V and R dof gets especially rattled.