One problem solved, two problems found.
Clipping on IFO REFL baffle is gone.
The problem of IFO REFL beam clipping by the last IFO REFL baffle in HAM2 (see alog 90251, especially this picture) seems to have been caused by a huge PRM change in the PRM alignment sliders made on Monday May/11/2026 past 1700 local time (that none of us knew/remembered/understood).
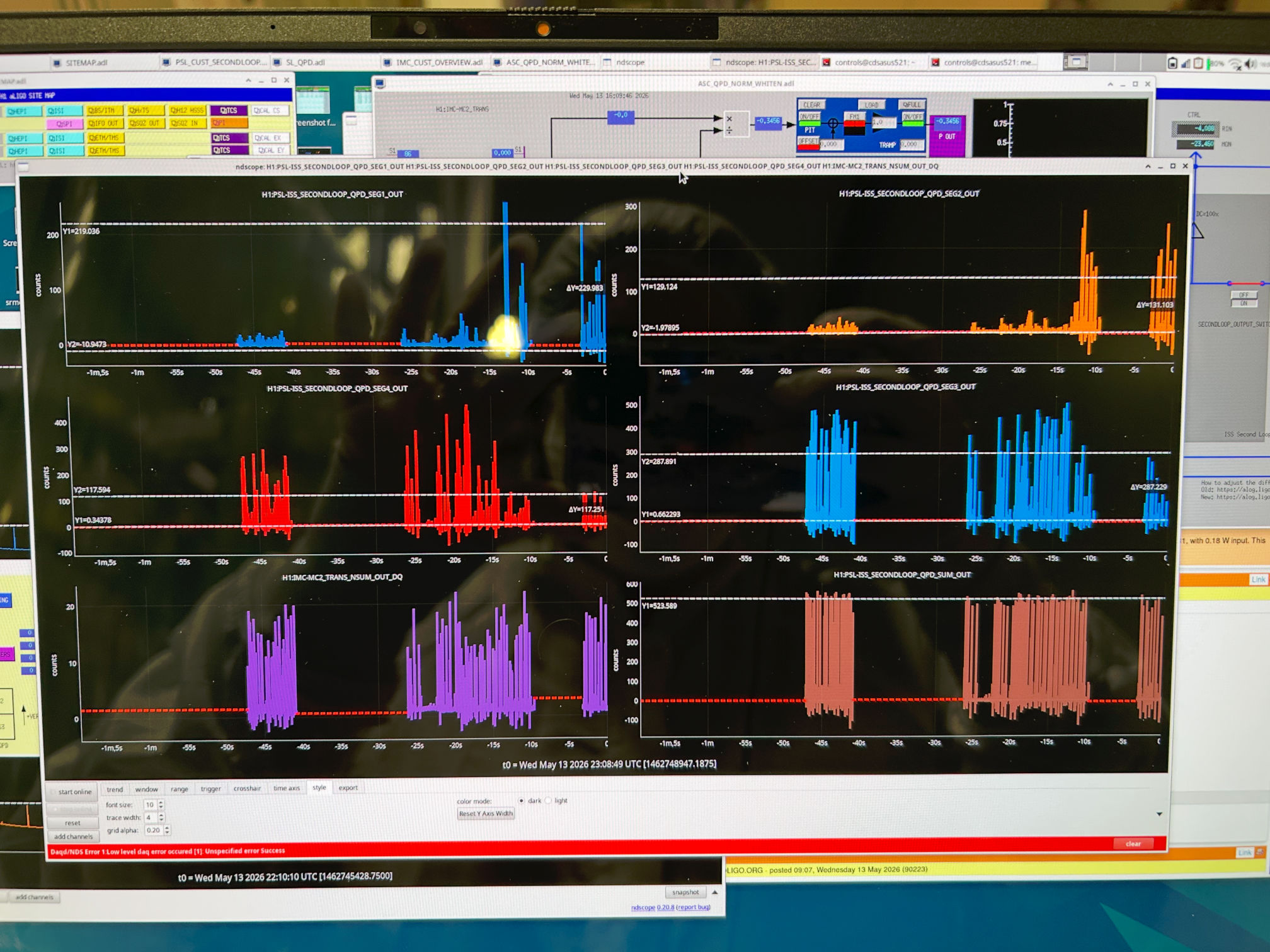
Once Sheila reverted PRM back to March/2026 alignment, changing the IFO REFL beam path (but not the alignment into ISS path), IFO REFL was not clipped any more even though it looked low on the baffle (IFOREFL_baffle.mp4). LSC and ASC REFL sensors on HAM1 ISI saw the flashes right away without any adjustment of RMs, and the flash peaks were already reasonable. According to Sheila, compaing to a time when DRMI was acquiring in November:
- 2W into IMC vs 0.18W into JAC now (9%, the power into IMC is less than that due to extra losses expected for JAC)
- REFL A nsum 4000 counts then, 218 now (5%)
- REFL B nsum 3400 then, 204 now (6%)
All of these were a good sign.
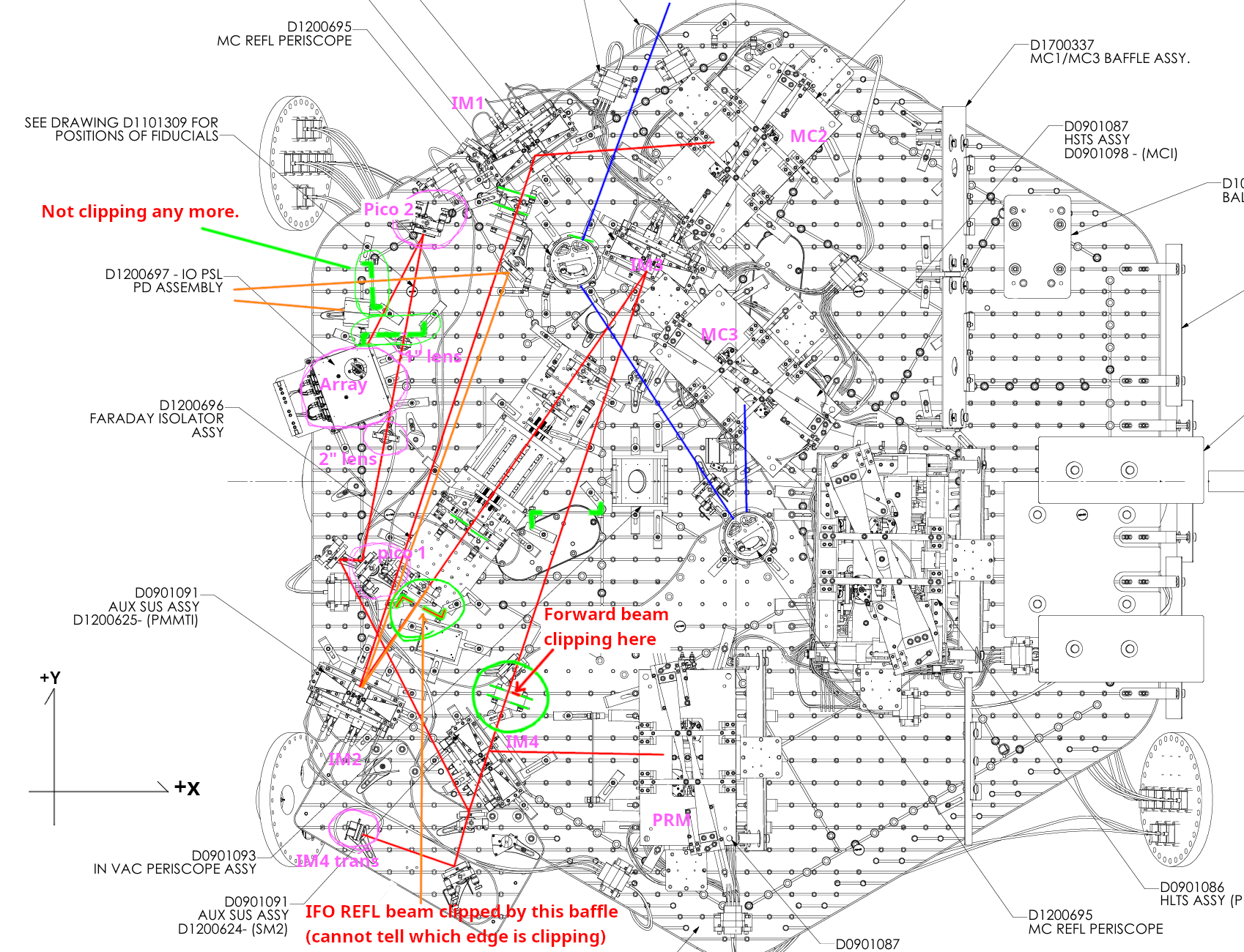
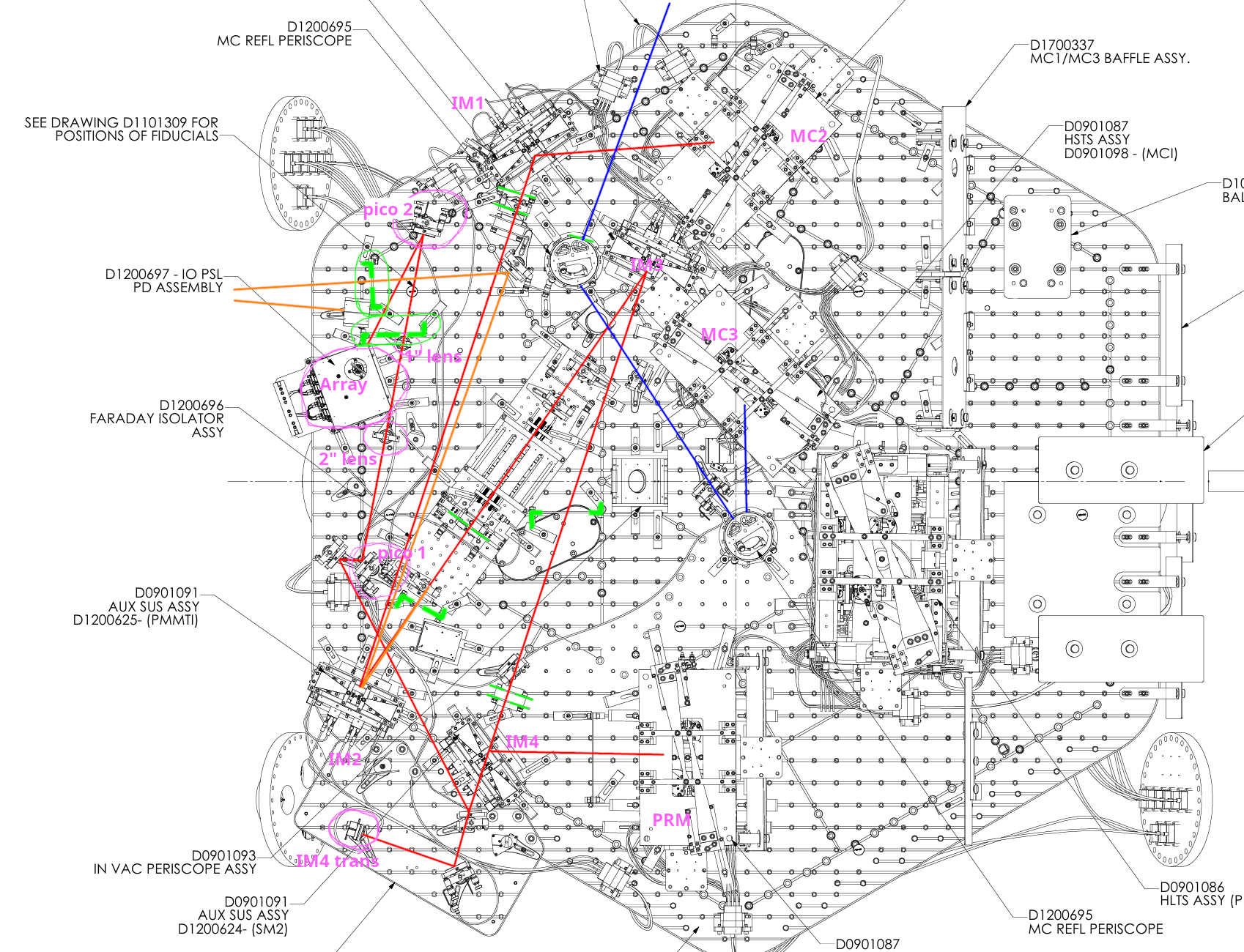
Forward-going beam into the IM4 is clipped by the baffle in front of IM4, and the IFO REFL beam is clipped by the baffle at the -Y edge of the IFI.
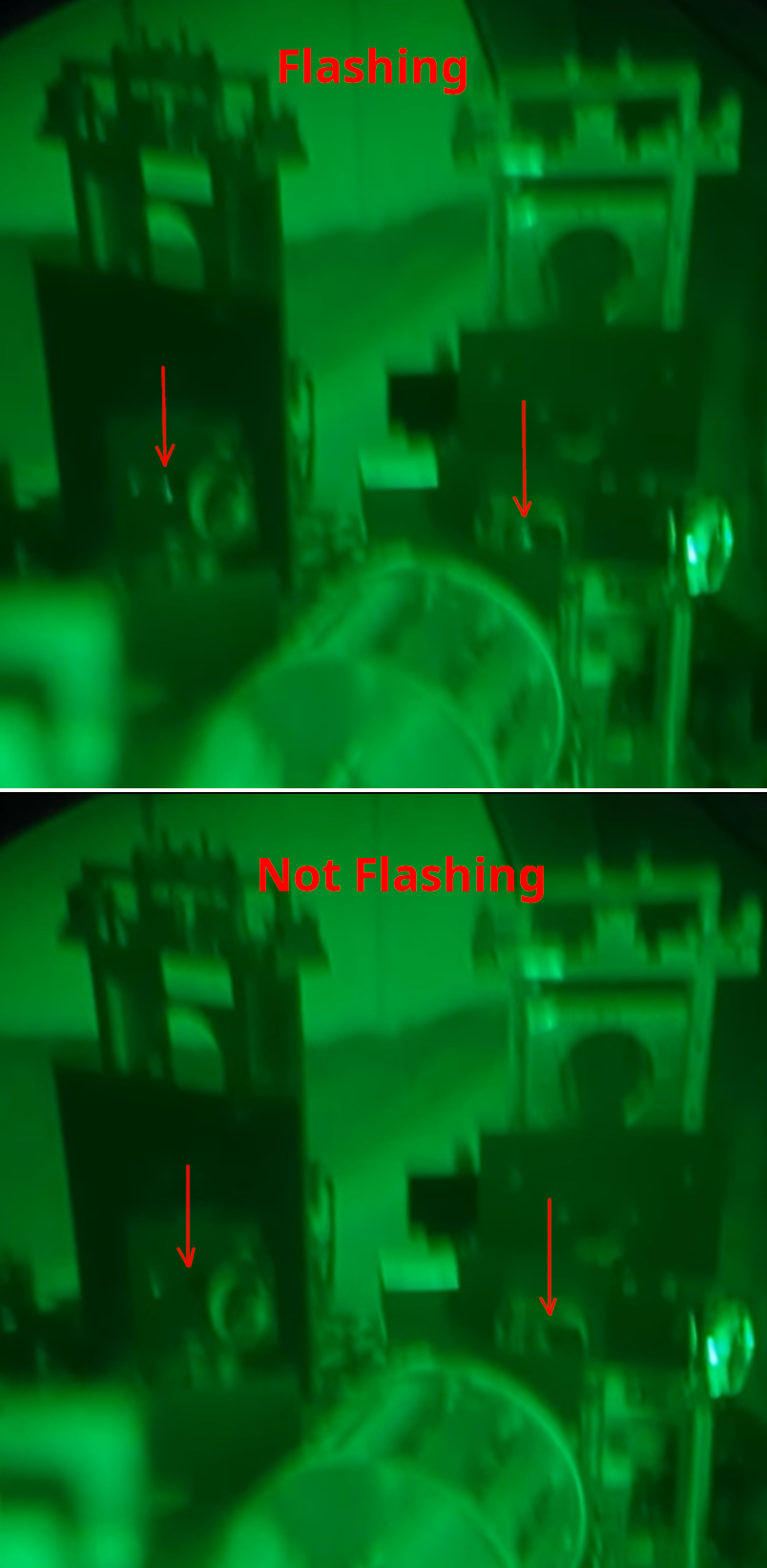
Unfortunately I've found that there were two other clipping points that I must have missed yesterday using IR viewer. See clipping.png, sorry for a blurry through-IR-viewer picture shot from the distance. Go back to HAM2layout_annotated2.png to figure out which baffle is what.
There's a baffle in front of IM4 between IM4 and IM3, and the forward-going beam is slightly clipped at the +X edge of that baffle.
Also the IFO REFL beam is clipped by the baffle installed at the -Y edge of the IFI. I know this is IFO REFL because the bright spot goes away when I block the beam on PRM by a sheet of aluminum. I cannot quite tell from the picture which edge of the baffle is clipping, but I think it's also +X edge.
In the past, when PRM spot position was measured with full IFO, it was like a mm off according to Sheila, so it's hard to imagine that the beam was clipping on the baffle in front of IM4.
Changing IMC alignment (trial 1, didn't fix clipping).
We decided to back off the changes we've made for MC1, 2 and 3 since Monday and revert back to in-vac March alignment. If we have to make a huge adjustment to JM3 to follow the IMC, maybe the beam coming from JM3 is suspect (which means that the MC2 trans path is somehow suspect too).
Before I did anything, the starting point was captured in alignment_2026-05-15_16-14-21.png.
MC1/2/3 was reverted just based on slider values and not using OSEM readings as per alignment_2026-03-18.png.
Then JM3 was adjusted in PIT and YAW to give the maximum transmission measured in IM4_TRANS_NSUM. Actually I didn't move JM3 as much as I expected.
That alone couldn't recover a good 00 mode flashing so I moved MC2 and MC3 to follow the input beam. MC2 moved back closer to the position this morning.
After that I felt as if it was somehow easier to optimize further using MC1 as well as MC3, thinking that it would be a minor adjustment but somehow ended up moving MC1 by a large amount after iterations.
My end point is captured in alignment_202605151726_sliders.png.
Without IM3 and IM2, the beam was still on IM4_TRANS as well as ISS QPD, the flashes were good, so I looked at the clipping on the baffle in front of IM4 as well as the baffle at the -Y edge of the IFI, and they were still there. IFO REFL baffle was still not clipping.
Will have to think about what these all mean.