J. Kissel
I've analyzed the reference data taken from 2017-01-03, and re-analyzed the data from 2016-11-12 with updated matlab analysis code that includes the LHO-only bug-fix regarding the gain of the AA/AI filter model (see LHO aLOG 32907). The results are tabulated below.
MAP (68% C.I.) MAP (68% C.I.)
Date 2016-11-12 2016-11-12 2017-01-03
(former analysis) (new analysis) (new analysis)
Optical Gain K_C [ct/m] 1.15e6 1.164e6 (0.09%) 1.086e6 (0.07%)
Couple Cav. Pole Freq. f_c [Hz] 346.7 346.7 (0.4%) 360.4 (0.4%)
Residual Sensing Delay tau_C [us] 2.3 2.3 (50%) 0.65 (200%)
SRC Detuning Spring Freq. f_s [Hz] 7.4 7.4 (1.1%) 6.9 (0.5%)
Inv. Spring Qual. Factor 1/Q_s [ ] 0.05 0.05 (8.7%) 0.03 (12%)
UIM/L1 Actuation Strength K_UIM [N/ct] 8.164e-8 8.104e-8 (0.2%) 8.091e-8 (0.2%)
PUM/L2 Actuation Strength K_PUM [N/ct] 6.841e-10 6.773e-10 (0.03%) 6.768e-10 (0.02%)
UIM/L3 Actuation Strength K_TST [N/ct] 4.389e-12 4.389e-12 (0.04%) 4.357e-12 (0.02%)
As expected, with the 2016-11-12 reference measurements re-analyzed, the estimated sensing function gain has increased by ~1%, and the actuation function have decreased by a few %.
Further, we see that -- also as expected -- the 2017-01-04 reference measurements show some evolution of the optical sensing parameters, no evolution of the UIM and PUM stage actuation strengths, and a few % change in TST actuation strength change due to charge evolution.
The steps forward from here:
- Convert the actuation strength in [N/ct] to [N/A] or [N/V^2] so we can create an updated reference parameter set for the DARM loop model
- Compare the new open loop gain model against measurements
- Use the loop model tp push new reference values to the front end CAL-CS model (changing the optical plant compensation, and the gain of the actuator compensation, L2/L3 change has already been pushed)
- Use the loop model to push new EPICs records that document model values at calibration line frequencies (the biggest change will be from the L2/L3 cross-over upgrade) << this is the major problem that's causing bad h(t) calibration flag
- Use the new loop model to push a new set of GDS FIR correction filters (small changes due to better AA/AI model)
- Confirm that time-dependent correction factors are within an expected range << if/when in range, this should green light the h(t) calibration flag
- Use the new loop model to generate DCS FIR filters to recalibrate the all data from the post-winter break from raw DARM_ERR and DARM_CTRL.
- Push hard for uncertainty estimations for both the first part of O2 and data post-winter break.
There's a ton of librarian information that I need to post that documents where all this data came from and what scripts were used, but I'll post as a comment later today.
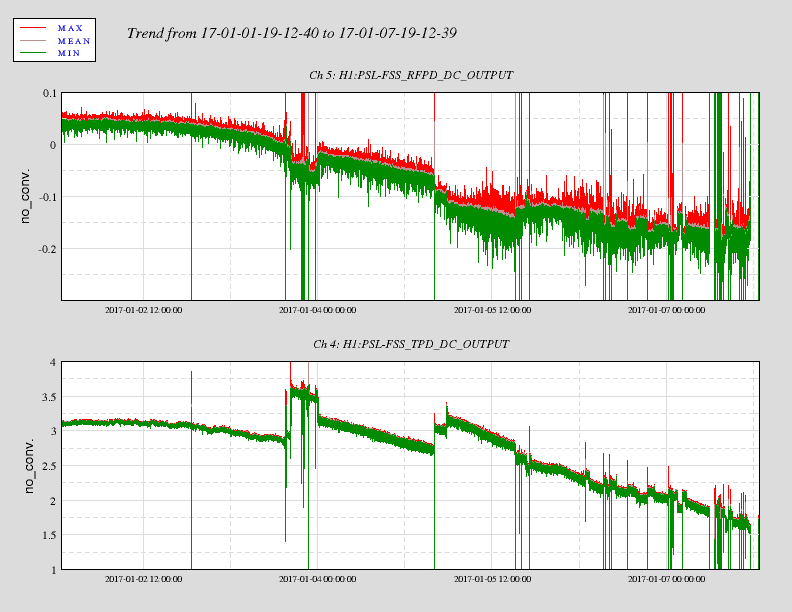

Looking at Terramon and the ground blrms, looks like there was an earthquake near 9:00 UTC, which the interferometer rode through.