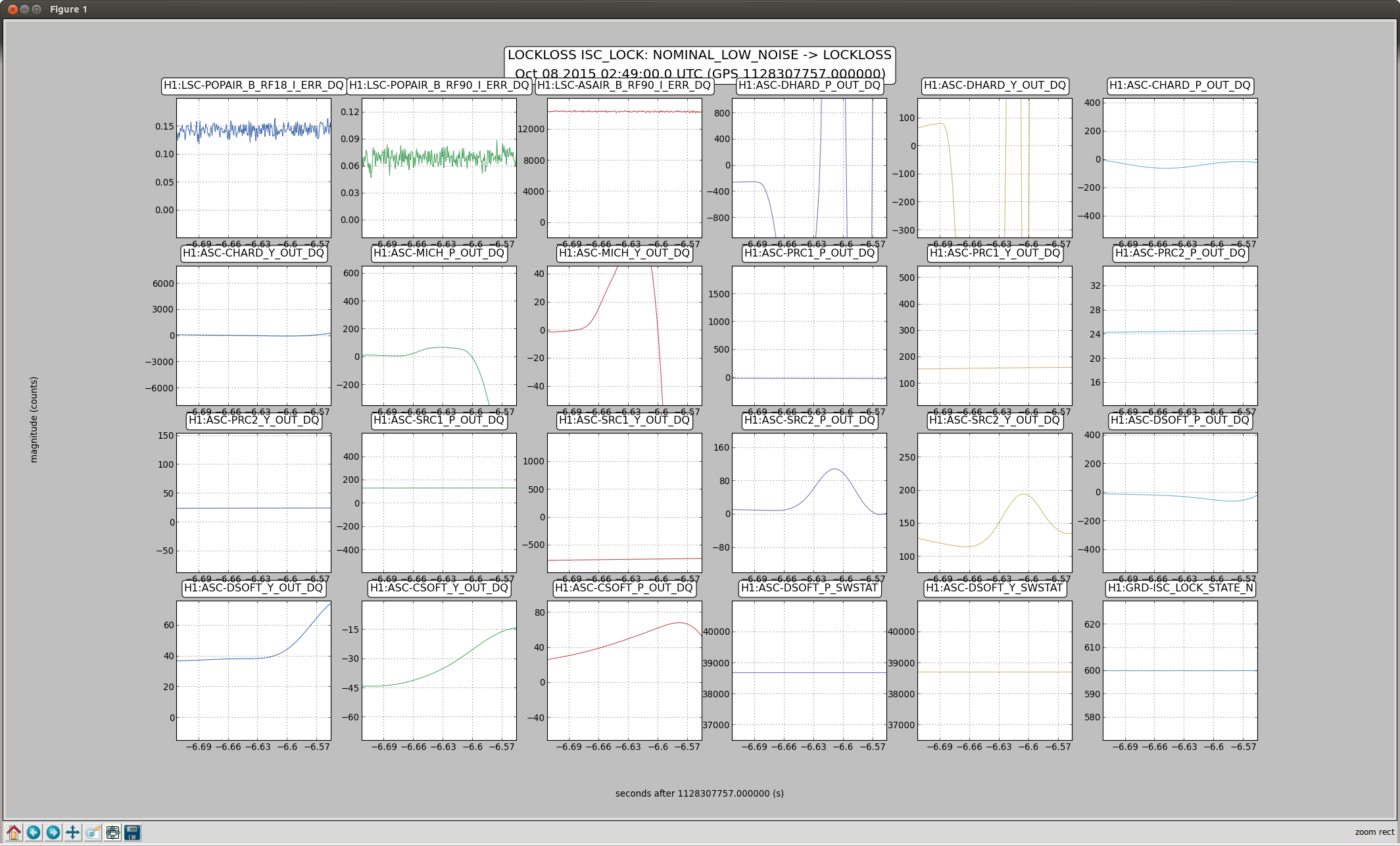
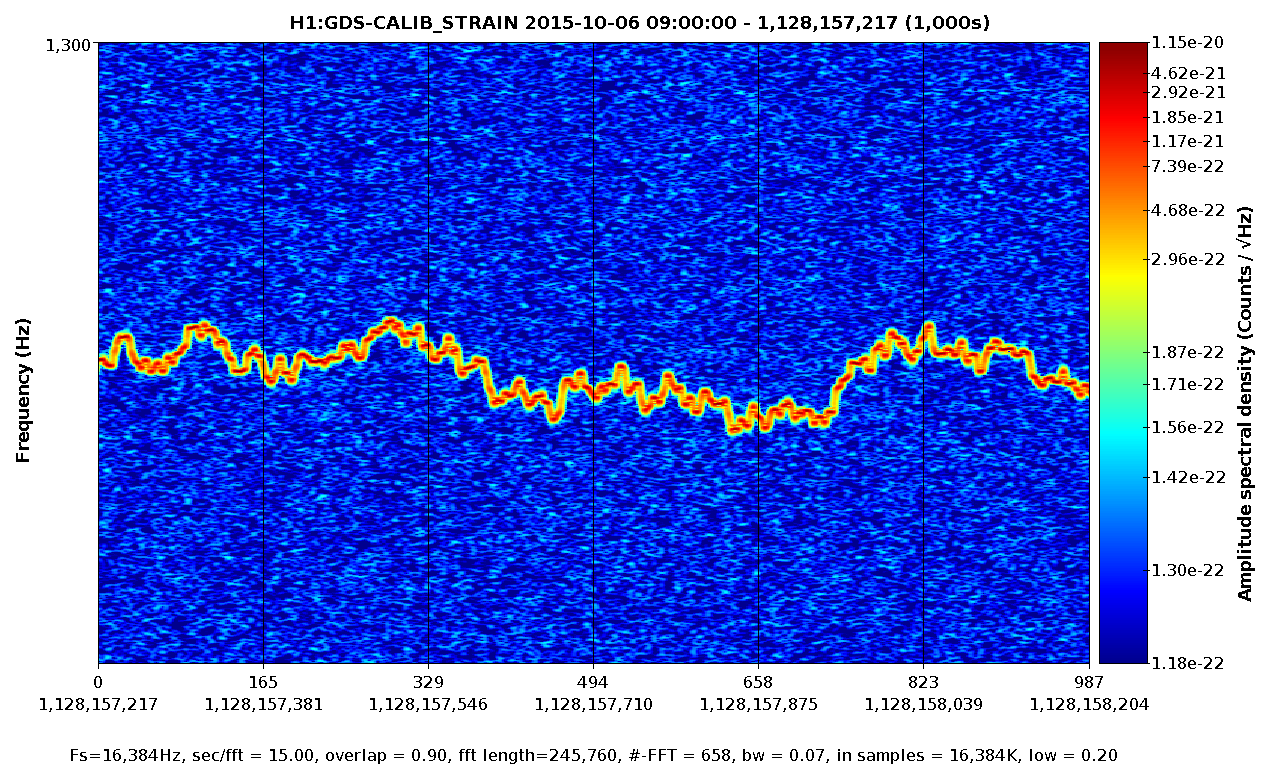
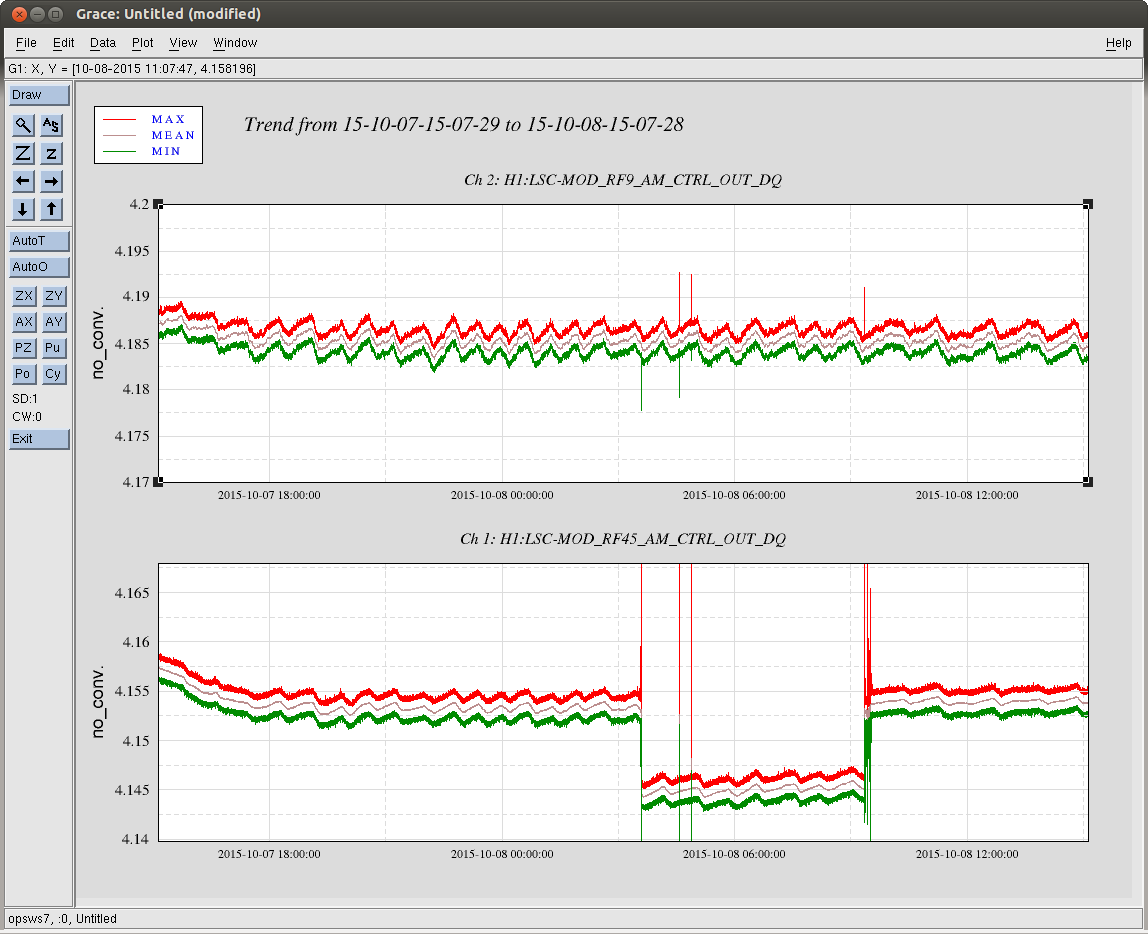
The attached plot shows the history of the controls signal over the past 24 hours. There was a step down about 12h ago in the control signals followed by a return to the old value about 6h ago.Some of the glitches were also seen in the 45MHz unit set up in the CER (shown in the 9MHz channel).
(Fil Keita Daniel)
Replaced the delay line extension in the RF45 EOM cable run and reterminated the cable towards the EOM. Tapping at the connectors and wiggling the cable still results in glitches. But, so does wiggling neighboring cables. At this point it isn't clear, if we are chasing a red herring. Needs to be monitored.
I checked the RF phase and it did by 1.8(0.1) deg from before. Should be OK.
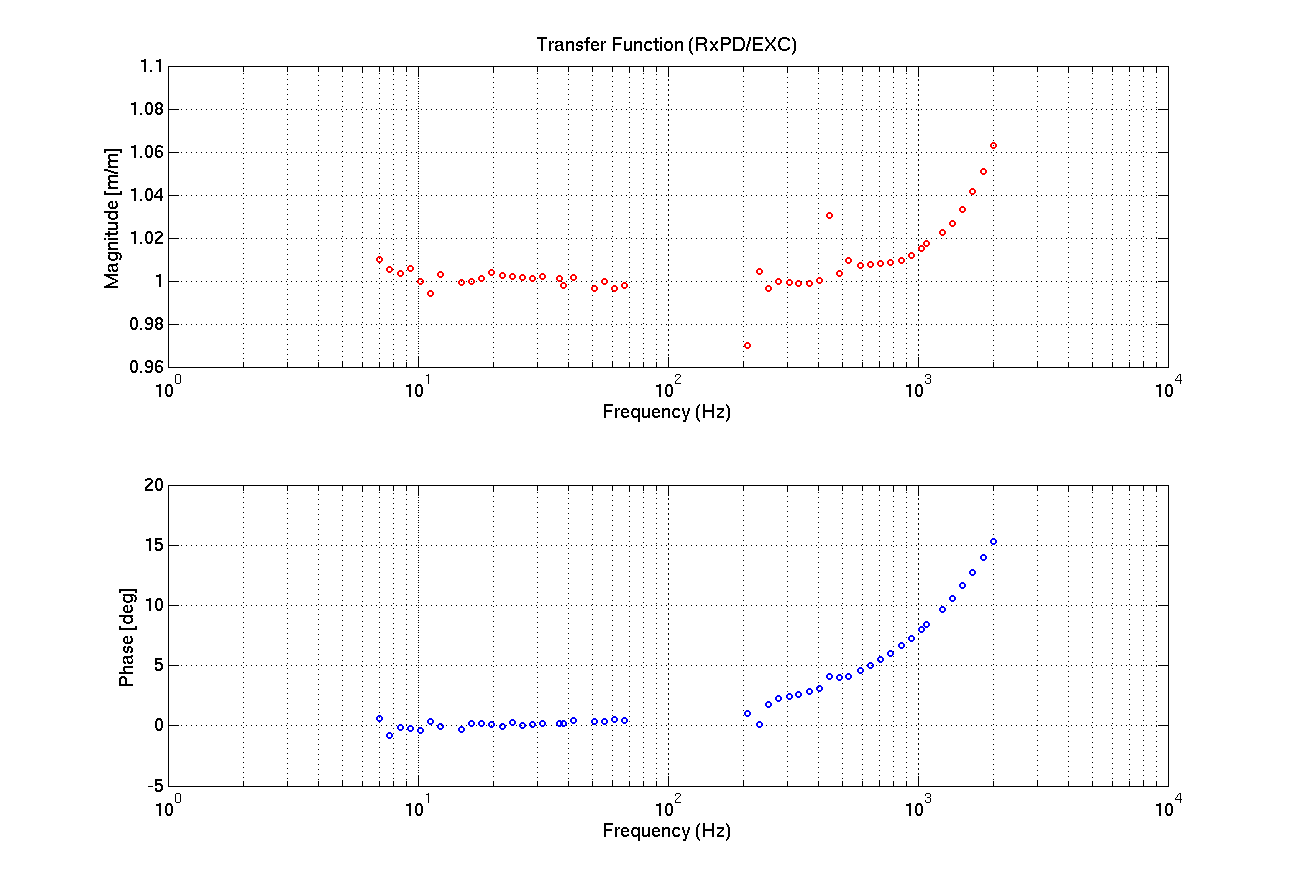
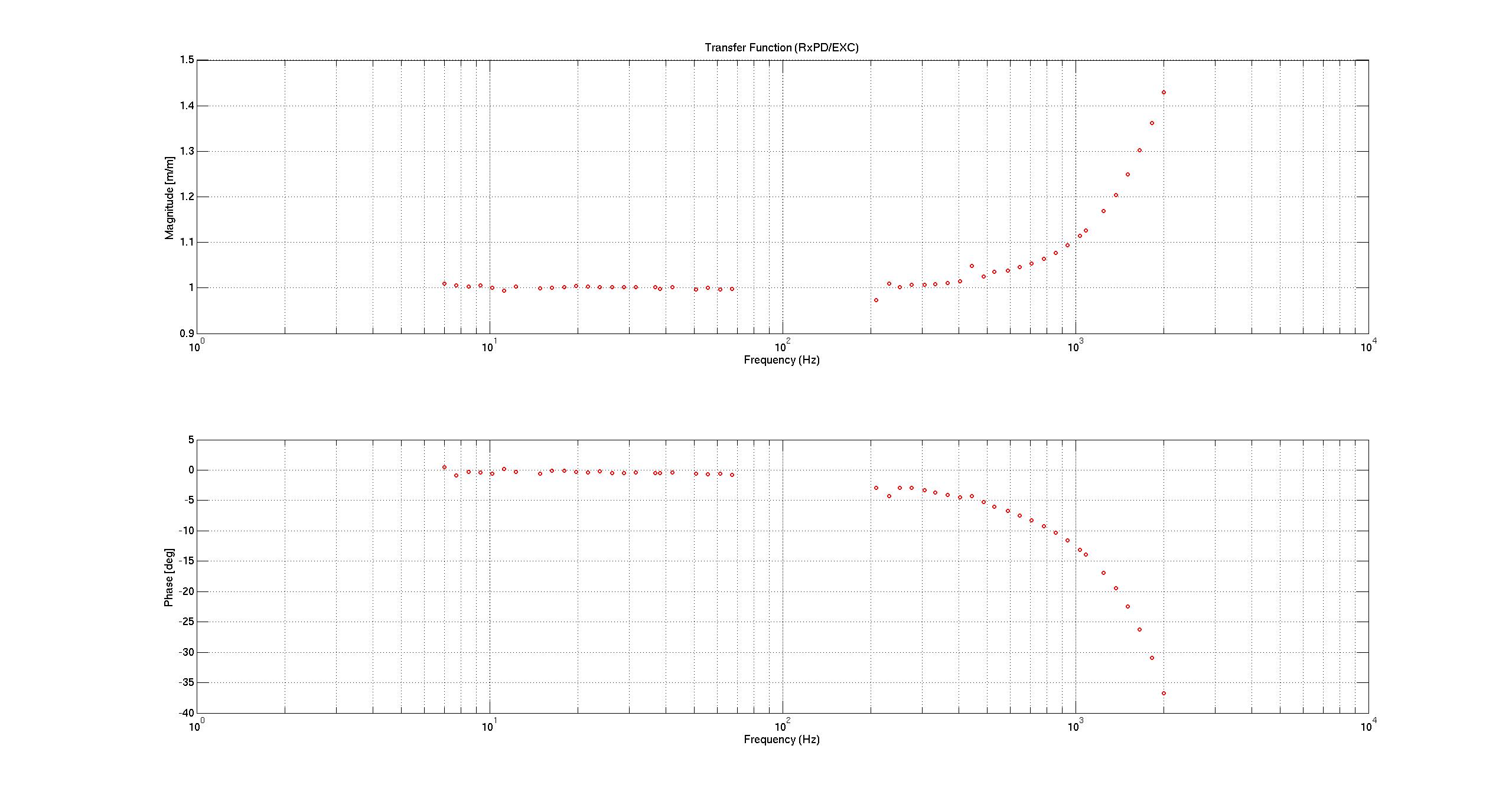
Free swing MICH, measured TF H1:LSC-ASAIR_A_RF45_Q_ERR_DQ/H1:LSC-ASAIR_A_RF45_Q_ERR_DQ with BW=0.1875Hz and took the data in [0.125, 0.75] band. Phase is pretty much 0 degrees, the important thing is the amplitude.
Amplitude(Q/I) = 5.18(0.04) (mean and sigma).
Therefore the demod phase is atan(amplitude(Q/I)) = 79 .07(0.08) deg.
| phase | |
| Aug. 10 (alog 20392) | 76.4(6) |
| Sept. 29 (alog 22061) | 77.3(0.03) |
| Today | 79.1(0.08) |