Jeff, Arnaud, Sheila
This afternoon the arm cavity was staying locked for minutes at a time, not really long enough to make a useful progress on WFS.
We decided to work on OpLev damping, in the hopes that we would be able to stay locked longer with OpLevs.
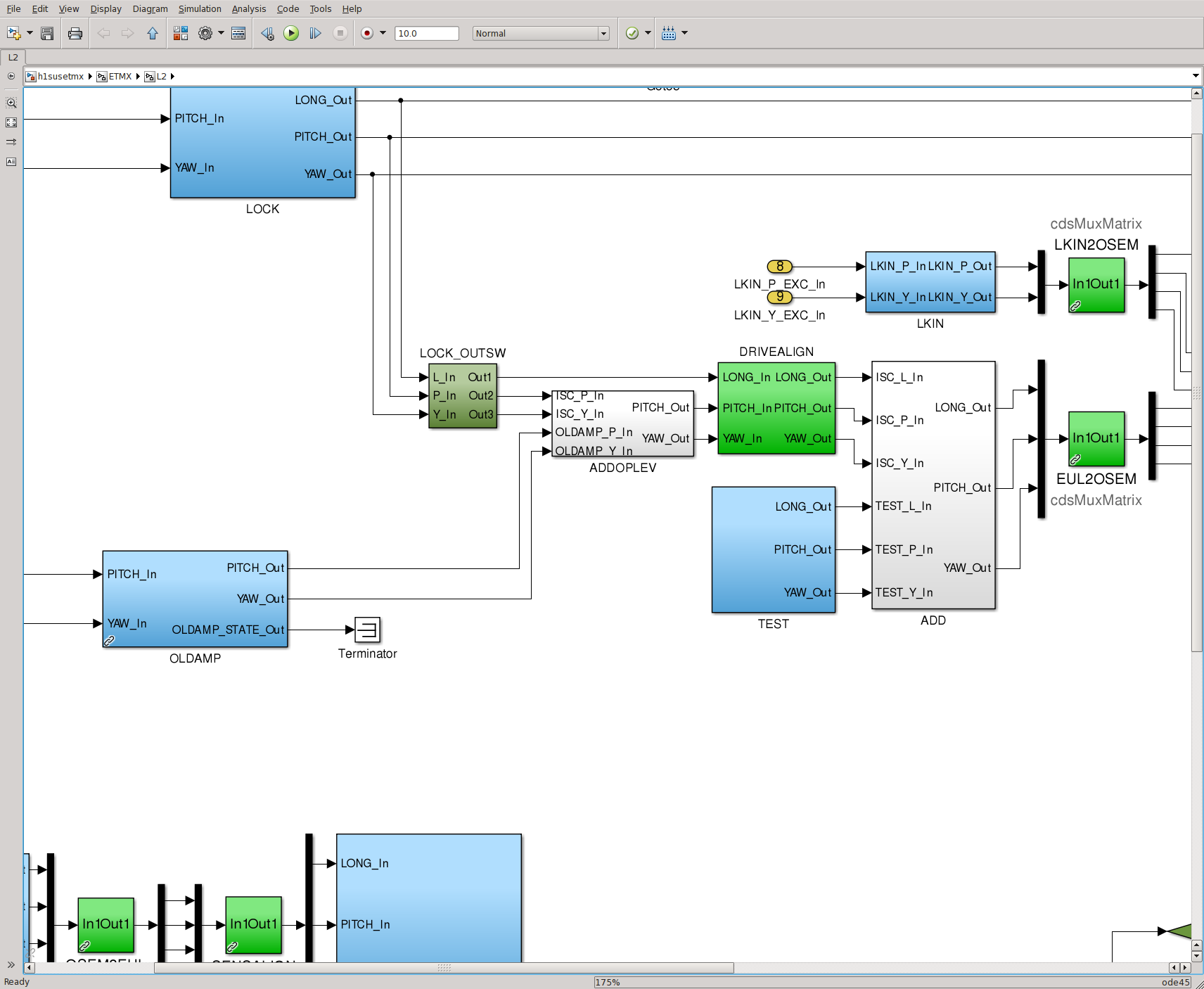
First we noticed that in the locally modified quad models for ETMX and ITMX, the OpLev damping signal was summed into the drive to the PUM after the drive align matrix, meaning that we would not be able to take advantage of all Keita and Arnaud's work of diagonalizing the PUM drive. So we made a change to the front end model to sum the oplev damping signals in before drivealign, but after the lock out switch. For the record this means that there can be a signal going to the osems even when the lock outout switch is off. Screenshot attached of the new version of the model, which is committed to the svn. This hasn't yet been done for L1 or ITMX, but we will want to do it if we are going to use OpLev damping permanently.
Based on Keita's measurement in alog 10747 we designed a controller to have a lower ugf of 0.1Hz and an upper ugf of 2.5Hz, with a pole at 10 Hz, which is now loaded in FM4 of H1SUS-ETMX_L2_OLDAMP_P. This immediately saturated the DAC, and we had to turn the gain down to -0.1 to prevent constant saturation. The current loop gain is attached, with gain from 0.4-0.65 Hz and gain margins around 40 degrees. If we want to use more gain, we will need to drive the UIM which means we will need to diagonalize it.
Since we are planning to use PUM for WFS as well, we will probably run into the same saturation problem with WFS, another reason to diagonalize the UIM.
We measured the RMS three times, before we started with no damping off (green) 85.5nrad then with damping on (magenta) 29.5nrad, and again with damping off (red) 48.2nrad. Because the ground motion was changing as we made he measurements, it is not totaly clear from the spetra that the loop is helping. The ratio between the ISI tilt (RY) and the OpLev spectrum at 0.43 Hz is decreases by ~5dB as we would expect from the loop gain.

Is it railing due to high frequency component?
You should look at the ASD and RMS of the coil output with damping on and off. See also the alog of Jeff.
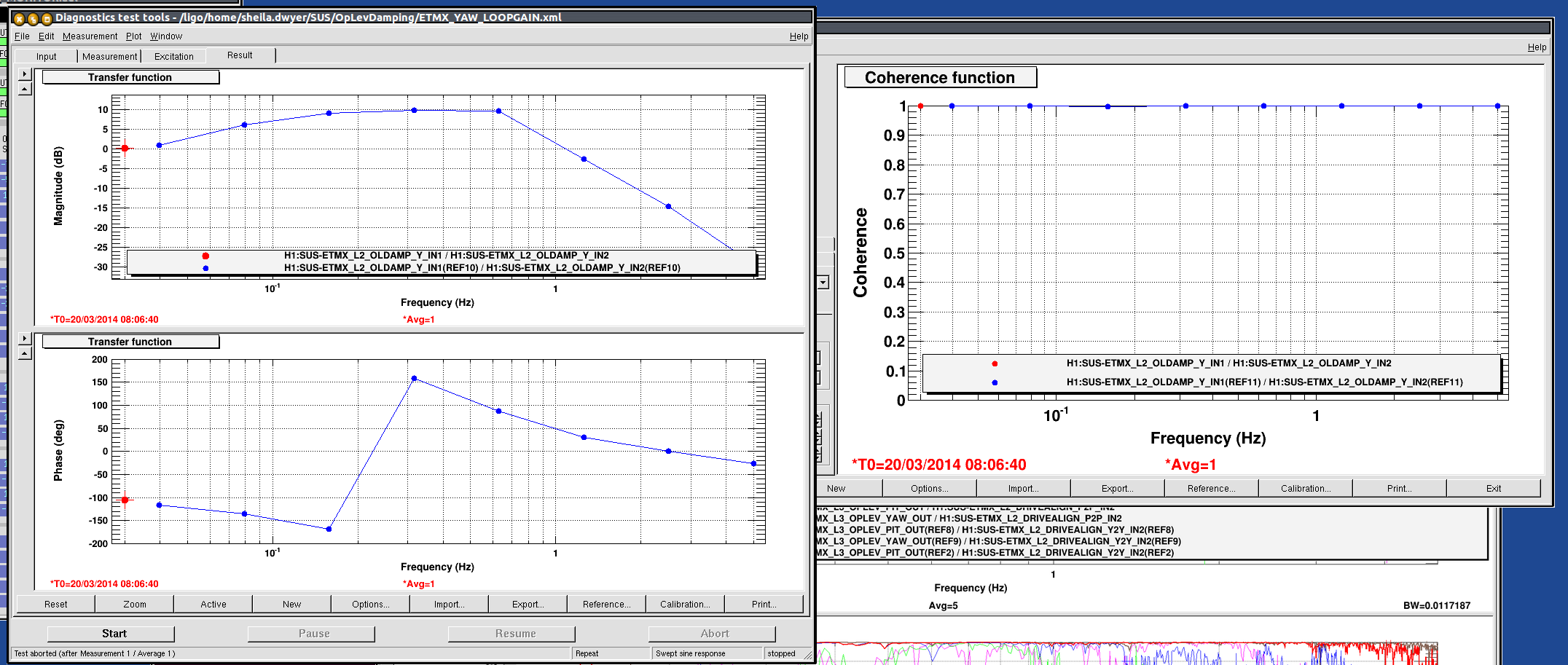
I had a look at Yaw, where the situation seems better than in Pitch. The plant for Yaw is verry similar to PItch ( see Keita's alog linked above), however most of the yaw rms comes from low frequenies, mostly from a peak around 0.13Hz. So this loop has a lower lower UGF, one at 0.03Hz with around 75degrees phase margin and the upper ugf is just above 1 Hz with 130 degrees phase margin. The controler has a zero at zero, a pole at 0.1Hz and a notch at 0.6Hz. (See attached open loop TF)
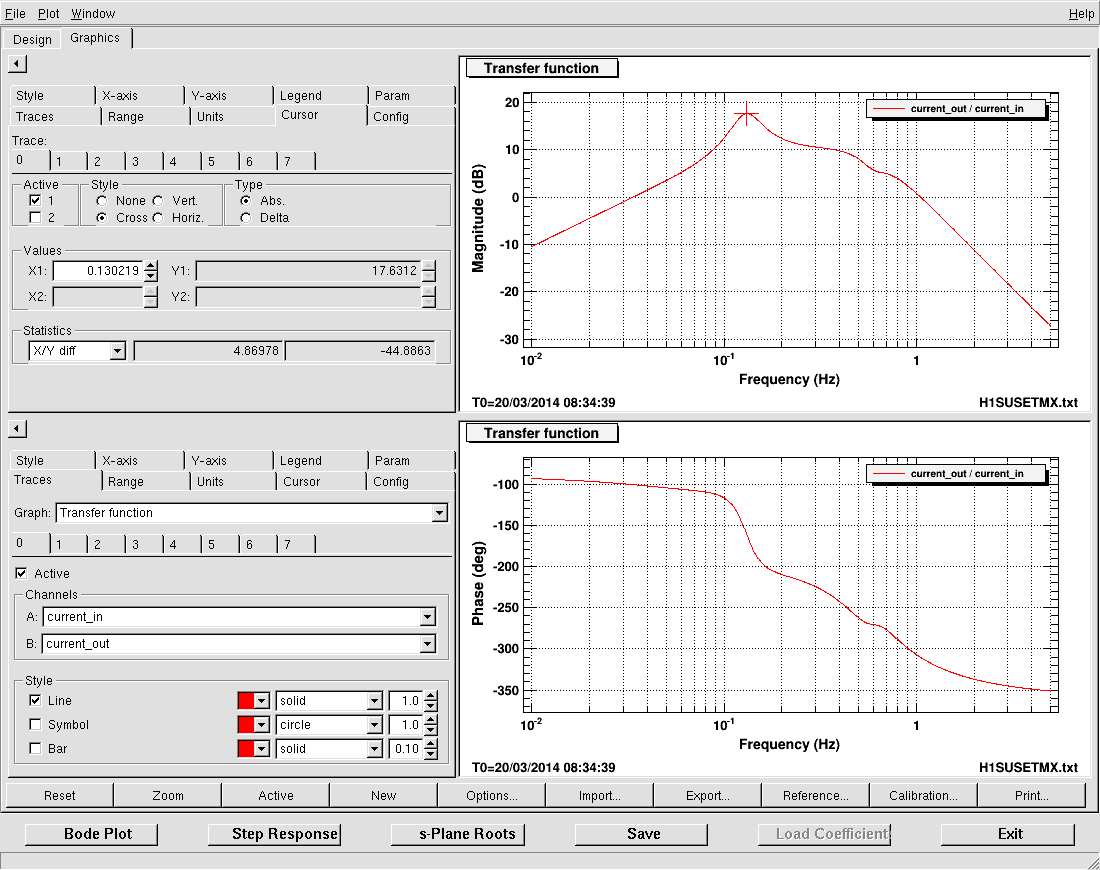
After looking at the spectrum with the loop on, I decided to add a resonant gain at 0.13 Hz, shown in open loop design in the attached foton screen shot. The filter Plant is an imitation of the Yaw to yaw transfer function in Keita's alog.
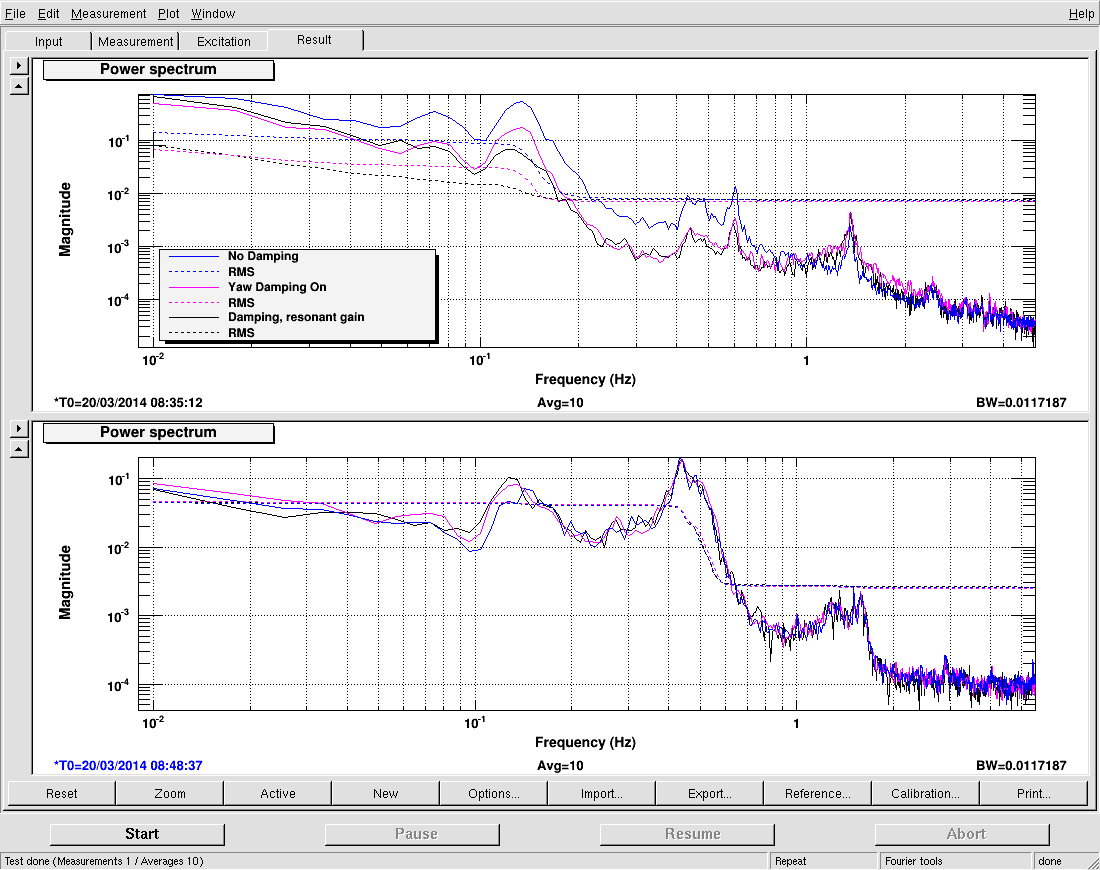
The last attached screen shot are spectra with and without damping. With the damping and resonant gain on the ASD is reduced by a factor of 10 at 0.13Hz, and the rms is reduced by a factor of 2 compared to no damping.
The Yaw damping doesn't saturate the DAC, so I think this is good and we can run with this on. Pitch will need more work, as Keita says.