[Sheila, Jenne, Cheryl]
We can fairly reliably lock on DC readout, and get up to 20W.
The not-so-excellent news is that we are pretty sure we don't have a good error signal right now for the SRC1 loops. The last few hours have been spent hand-aligning the SRM to minimize POP90 (with SRC1 open, all other ASC loops closed), and trying to figure out what the appropriate combination of AS36 error signals is. However, this input matrix changes with power, and isn't necessarily the same lock-to-lock. Also, with the error signals that we think are right (using only a combination of AS 36 Is, no Qs), closing the SRC1 loops (esp. yaw) make us lose lock. We've had more success opening up the SRC1 loop at DC readout, and just leaving it alone while powering up.
We tried moving the beam splitter (by putting offsets in the MICH ASC loop) but that didn't ever help improve the POP90 buildup, only hurt it, so we are pretty sure (at several powers up to 14W) that the MICH ASC error signal is good, and holding us in the correct place.
We also tried moving CSOFT rather than SRM after a power-up to minimize POP90, since CSOFT P's error signal sees a jump when we power-up, but that didn't help either. It seems like SRC1 really is the loop that's causing problems, and allowing POP90 to increase and run away to lockloss.
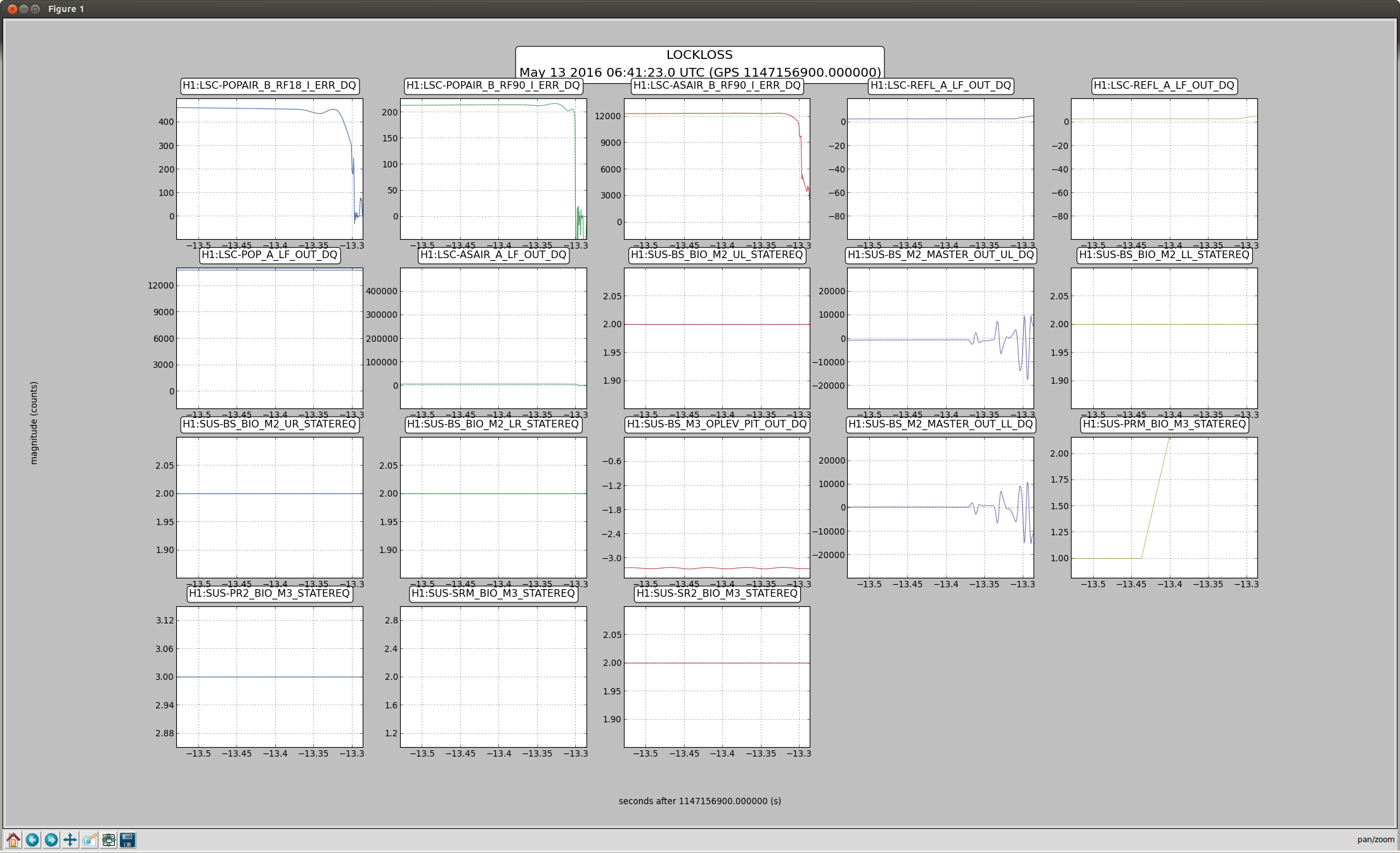
With the technique of letting the SRC loops converge at DC readout, then opening SRC1, we can power up (in steps of 5W) to 20W and sit there. We started to see our dP/dTheta 0.5Hz instability when we went to 25W, so we backed off to 20W, and tried to get to low noise. As Sheila notes in alog 27518, we lost lock in the Coil Drivers state. But, we think that there's no reason we can't get back to 20W and hang out there.
Earlier in the evening, we reset the AS90 WFS dark offsets (very small changes), and reset their gains (moderately small changes) such that DC and AS90 WFS both read zeros while in DRMI-only lock with the arms held off resonance. But, there seems to not be much signal at all in AS_90_B_Pit, so it's still not clear that we can use them for our centering signals.
We have some thoughts on ways forward for SRC ASC on the whiteboard, including things like: re-looking at AS45I as an error signal, actuating on SR3 rather than SRM, trying the dither-align servos with SR3 rather than SRM, and looking at suppressing other REFL45 signals more strongly, so that we could potentially see some SRC signal there.
Separately, it would be good for someone tomorrow to try engaging the ISS second loop with just the MC locked at 20W, so that we know if it functions or not before we try it in full lock.