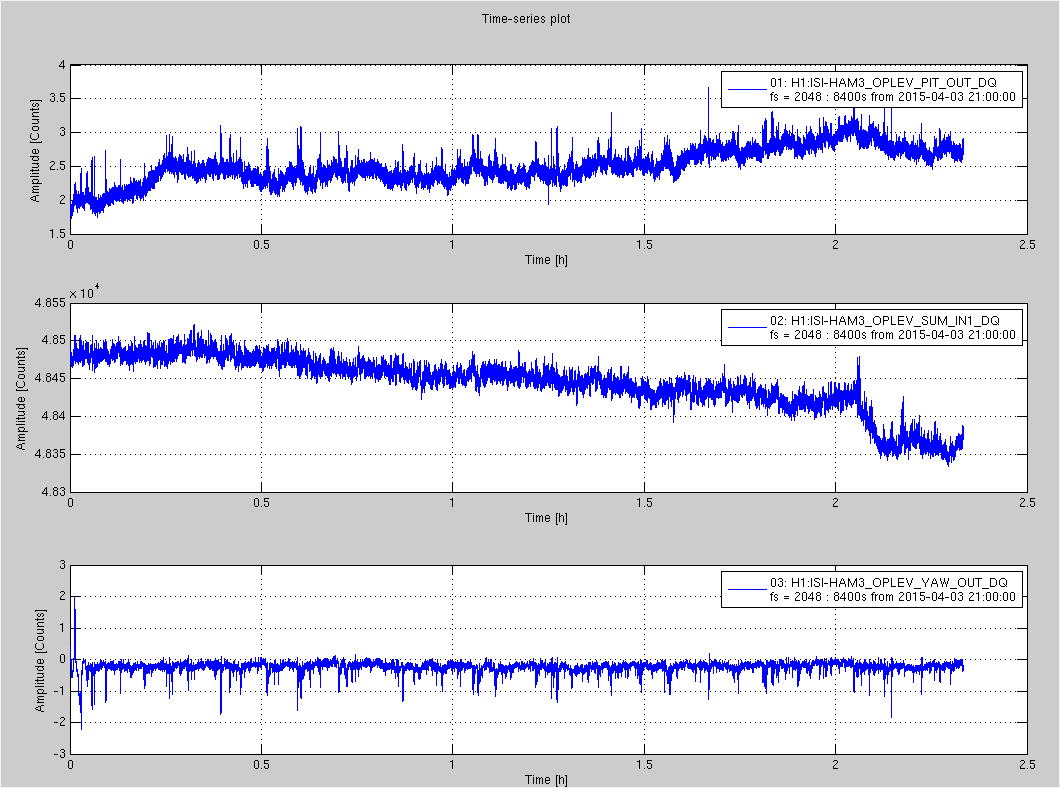
I was taking HAM's 2-4 down this morning to install higher gain control loops. HAM's 2 and 4 went down and came right back up. HAM3 refused to re-isolate, and it took a while to figure it out. It turns out that HAM3 is restoring a large pitch (RY) offset, and Guardian is restoring this offset at roughly the same time it tries to engage the horizontal iso loops. When it does this it sends a large tilt to the GS13's and trips the ISI. Eventually I got around this by switching the GS13s to low gain, and the ISI came right up, whereupon I switched the GS13s back to high gain. A couple thoughts:
1. We should restore fewer DOFs on the HAM's. It wouldn't have prevented this particular problem, but the ISI doesn't wander much, the HAM's don't trip often. I also think that the commissioners probably only care about a few angular DOF's (sadly RY on HAM3 is probably one) and keeping historical x/y offsets only make isolating/de-isolating the ISI's and troubleshooting more difficult.
2. HAM3 is restoring a 4000 nrad offset. We should try to offload this to HEPI. Isolating and de-isolating HAM3 ISI is made more difficult by servoing to this position because it sends a big tilt to the GS-13s, which see it as translation.
3. If we can't risk shifting this offset, we should add GS-13 gain switching to the HAM's. Hugh found this sent an impulse to the BS, but that only mattered because it disturbed Mich. We only maybe need this on HAMs because of the need to restore ISI angular offsets (which we don't do on BSCs) and we don't need to switch while operating the IFO. The infrastructure exists, the SEI group may need to do a tiny bit of thought about how to implement it. We only need to switch when transitioning to and from isolated.