J. Kissel, M. Evans, D. Hoak, E. Hall, A. Staley
As Dan describes briefly in LHO aLOG 15297, we want to think about how to implement ALS COMM, ALS DIFF, DARM, and CARM, very-low-frequency, tidal offloading global control to the ETM HEPIs in the front end. Currently we're using a guardian-run servo over EPICs, as described in LHO aLOG 15244. In this log, I describe our thoughts on how to do for the long term.
After scouring the LSC model, we've found that ETM HEPI models are currently receiving the same LSC signals that the ETM QUADs are receiving. This is left over from when we were trying to attempt the distributed hierarchy. However, now that we've moved to an offloaded hierarchy for length control, we don't want to have to re-create the integrators that exist up the QUAD's signal chain, hope we get it right (and or the computer), and integrate once more to get the offloaded control signal we want. The REFL_SLOW path -- the digitized, slow output of the CARM Common Mode Board which takes the ALS COMM signal as its input -- was initially tossed up as an idea for the digital, very-low-frequency, COMM correction signal because it's currently hooked up through to the LSC CARM bank, but for the reasons described above, it's not exactly what we want for the long term.
After discussing the options, we've decided that we need an additional path from the LSC model to each ETM HEPI AND we want to restore the OFFLOAD path from the TOP of the QUAD (straight) to HEPI.
Why?
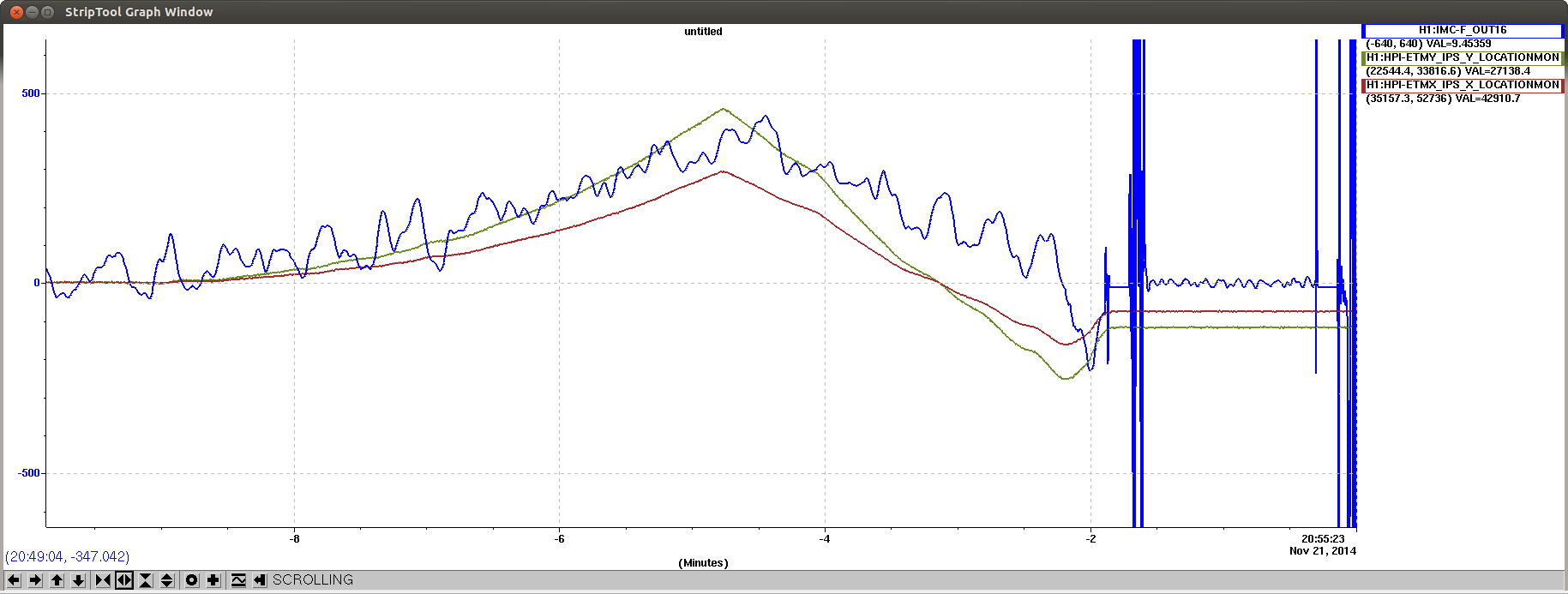
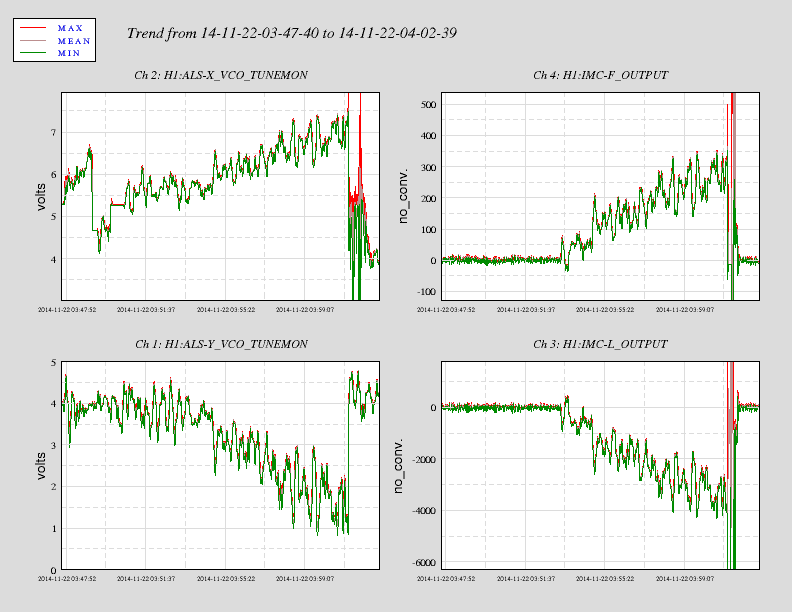
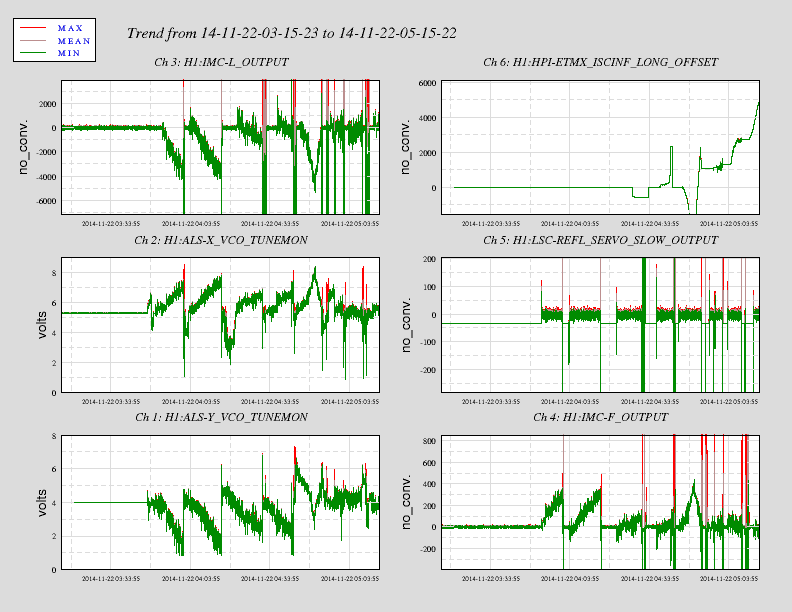
- Currently, the digital IMC length control (the natural signal for controlling tidal drift) is only fed directly to MC2, and does not pass through the CARM or DARM banks.
- We don't want to offload to, or directly control use the TOP mass of the QUADs because that stage of the QUADs have proven to have particularly bad length-to-angle coupling such that large longitudinal control signals just pitch the test mass over destroying the lock just as much as tidal forces would by themselves by reaching the range of the various VCOs.
- For CARM, one might ask - why not offload to MC2's HEPI? - can't because PR2 is also in HAM3, and the low frequency displacements to the PRCL aren't the same as what's needed for the red laser frequency. Further, a nuance of how the green end station lasers are tied to the PSL -- with the *transmission* of the reference cavity, which doesn't change when the IMC to PSL VCO to REFCAV REFL servo is changed -- while the COMM / CARM feedback to the PSL via the IMC changes the *red* frequency to match the common motion of the arms, it *doesn't* change the *green* arm laser frequencies in common with the arms.
- For DARM feedback, which will be sent through the suspensions because we need the bandwidth, will be offloaded on a few stages on its way up to HEPI. For CARM, we send most of the control through the MC2 SUS all the way to its TOP (because its a much better behaved SUS) and only the very low frequency would need to be send to the ends. So CARM and DARM need inherently different paths.
- For DARM, one might ask - why offload straight to HEPI, why not ST2 of the ISI and up-through as we've snaked through the QUAD? - because, currently, the best configuration is not to use ST2 of the ISIs. The offload path would require the isolation loops to be ON in order to function. Given that the ISI configuration is still, and will probably be, under flux, let's just go straight to HEPI which has happily run with position loops only for quite some time, and we've found that it runs best that way.
Given that we're still unsure what will work, we propose to create an additional, mini output matrix in the LSC model that takes in DARM, CARM, and IMCL, and spits out control to ETMX and ETMY HEPI.
How much extra infrastructure is needed?
- A new mini-matrix as described above, and the wires to make the connections from DARM, CARM, and IMCL to it and out to the top level.
- Two new RFM IPCs between the LSC model and the two end station HEPI models.
- Restore the M0 offload filter path and EUL2CART matrix that was removed in ECR E1300578, for the Longitudinal DOF only.
- Two new end-station dolphin IPC connections between the QUAD models and the HEPI models.
- Two new filter banks in the HEPI model (or at least after the output matrix, it could be in the LSC model) to match the frequency response of the direct CARM offloaded signal from LSC to the indirect DARM offloaded signals from SUS.
- A summing node at the top level of HEPI.
How painful will this change be? How much will it affect library parts?
- The LHO LSC model is currently still hooked up to a library, but I'm not sure whether LLO is using it. So, though not under ECR control, a discussion might be nice before a change is made.
- Because we can only imagine doing such direct LSC global feedback to the ETM HEPIs, we can add the new filters and summing node to the top level of the ETM HEPI models, and send signals into the common HEPI library part as is without modifying it (or requiring an ECR).
- Even though we've removed the OFFLOAD path from all SUS, because we had wanted to re-create the total length control signal on the QUADs eventually (like is done for IMC-X), the longitudinal control signals are still passed to the top of the library part for the QUADs (thank god). Thus, only a top-level change is needed for the QUADs as well -- the EUL2CART matrix and IPC parts can all be added to the top-level of the ETMs only. Because we're only trying to change longitudinal, we shouldn't even need the full EUL2CART matrix (as originally described in T1100617)
So in summary, not that bad.
BUT -- we'll probably still wait until next week to get started with the changes given the limited staffing over the Turkey-day holiday.
Thoughts and comments welcome, ESPECIALLY those that come in BEFORE we make the changes.