This is related to Hugh's log 14774. To elaborate a bit on Hugh's log, I made a measurement with Stage 1 Damped only and HPI isolated. The first plot shows the GND_T240_X , ST1_T240_X and HPI L4C (out of loop witness). There was no coherence with ground below 0.1 Hz but there was significant coherence with HPI L4C. This meant that HPI was somehow introducing excess low-frequency motion.
We then did the same measurement on ETMY and saw no such excess motion. The second pdf shows the corresponding measurement. Stage 1_Y was very coherent with ground_Y. Jim mentioned he had modified the HPI controllers on ETMY as described in Hugh's log, so we decided to try the same on ETMX in X and Y.
This has made a significant difference to the low frequency performance of Stage 1 as shown in the third file. Performance below 0.1 Hz is much closer to ground motion now.

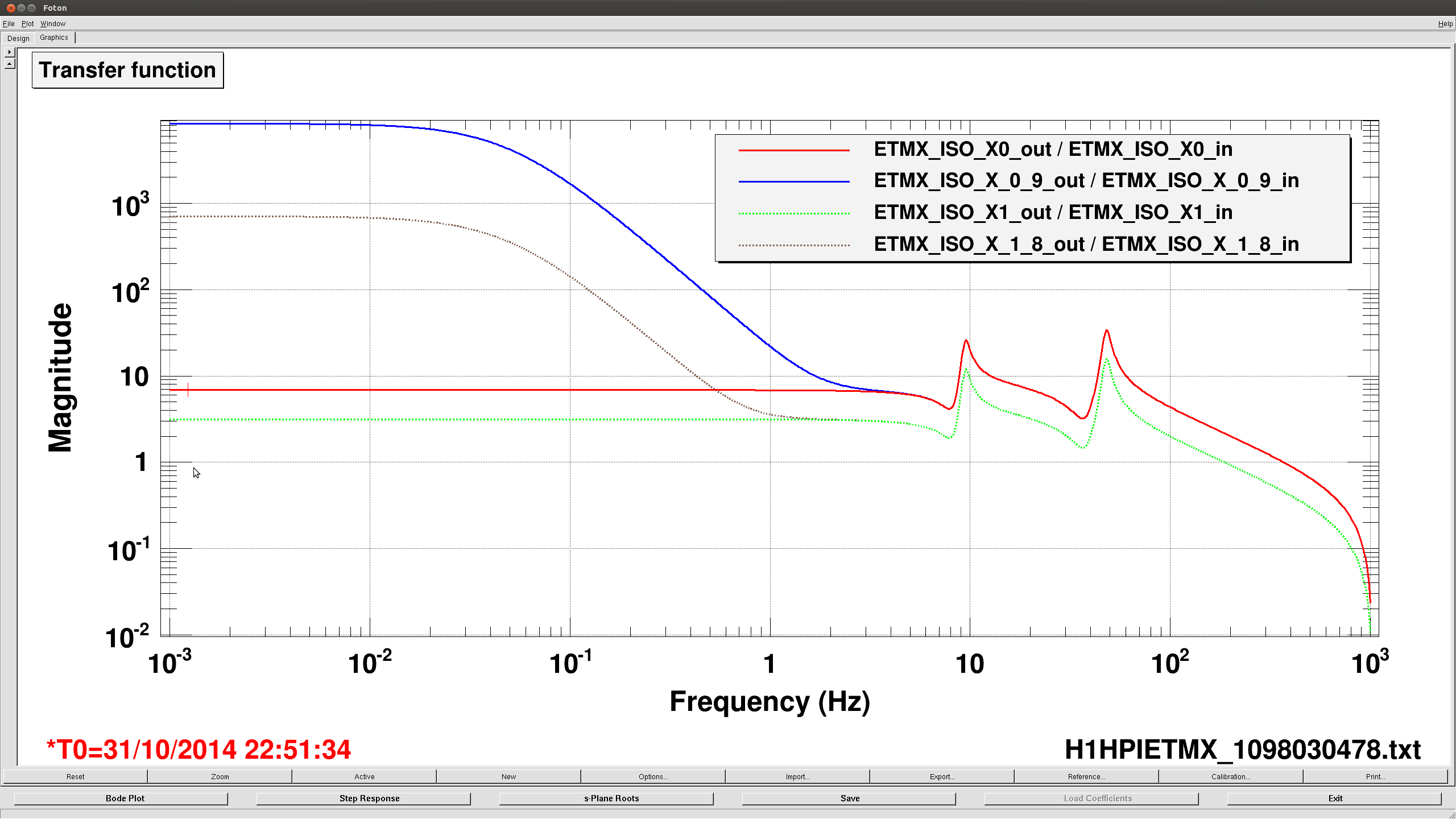
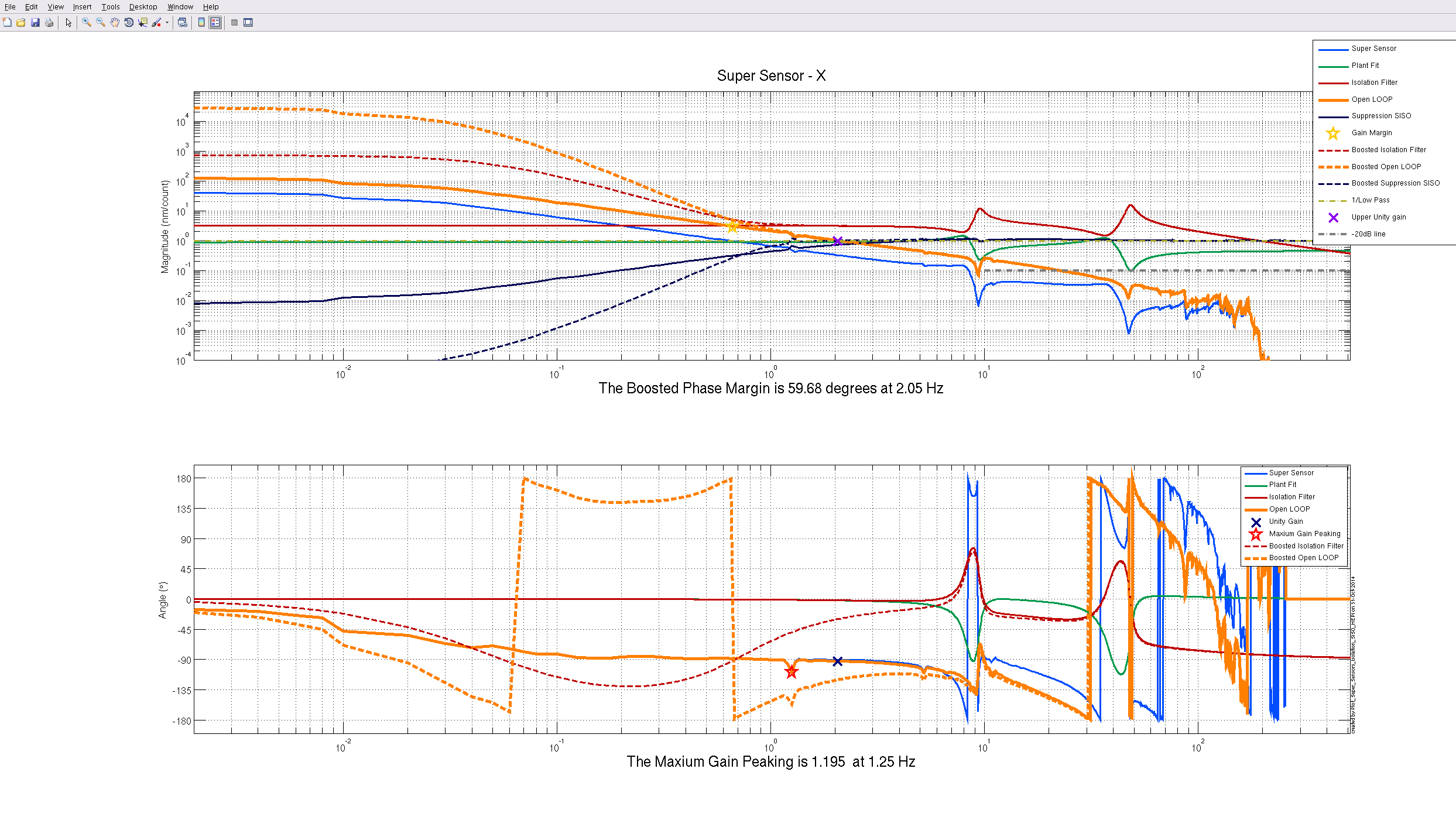
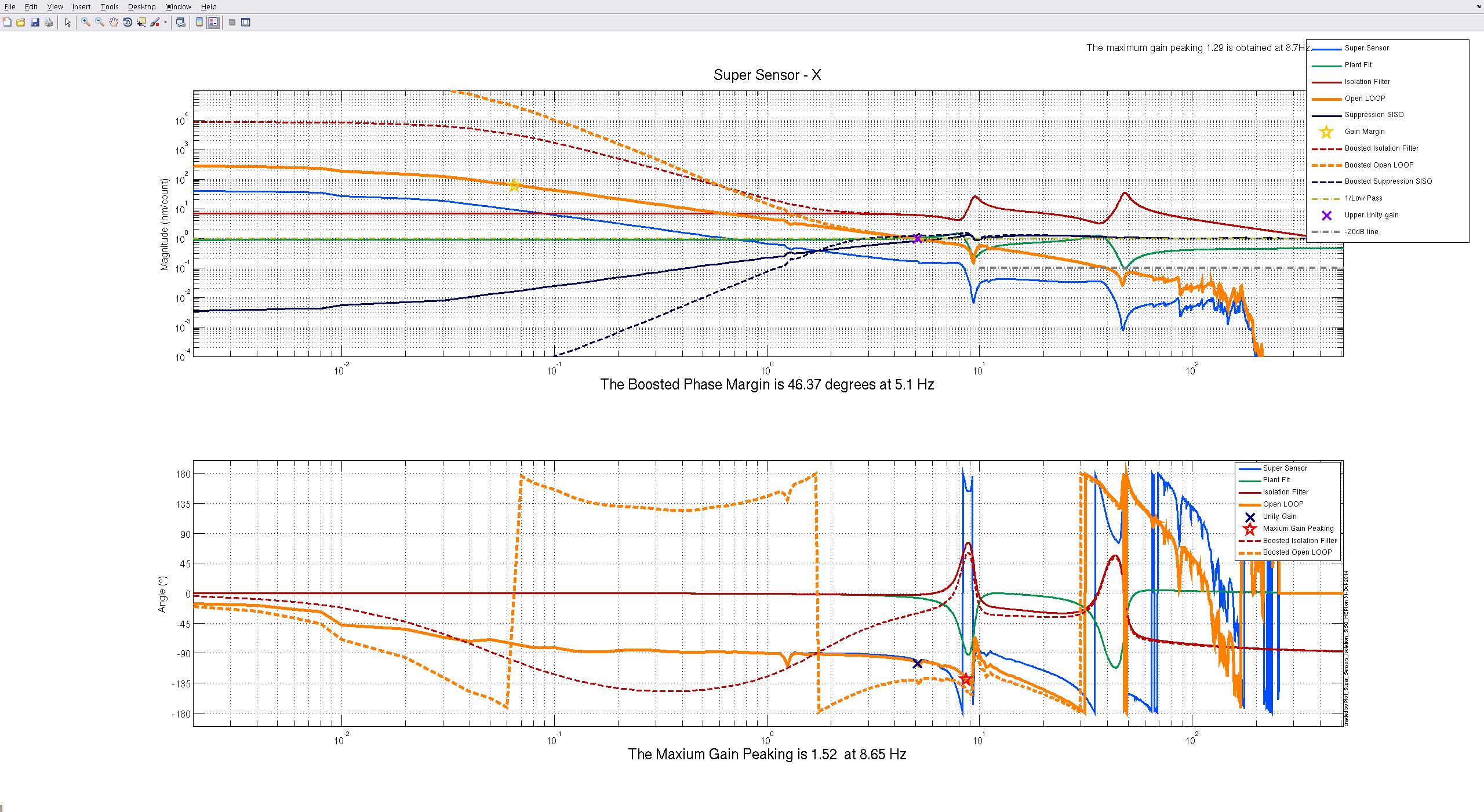
Some more plots of the old vs new isolation filters, per Jeff's request. I dug into the foton file to find numbers to back up what I thought the original design was. The gains of the old and new foton filters are shown in the first image, they show that not much was done to the filter design, just that the gain was reduced. Solid lines are the old design(higher gain, UGF), dashed lines are the current design. Second and third images are the currently installed plant design and a reconstruction of the orignal design (no plots were found from the original design from earlier this year). The solid and dashed orange lines tell most of the story, mostly we just cut the UGF to 2hz, and modified the boost to get more phase margin. No idea why this affect the very low frequency noise, Jeff and Krishna suggested maybe we were re-injecting IPS noise with the higher gain.
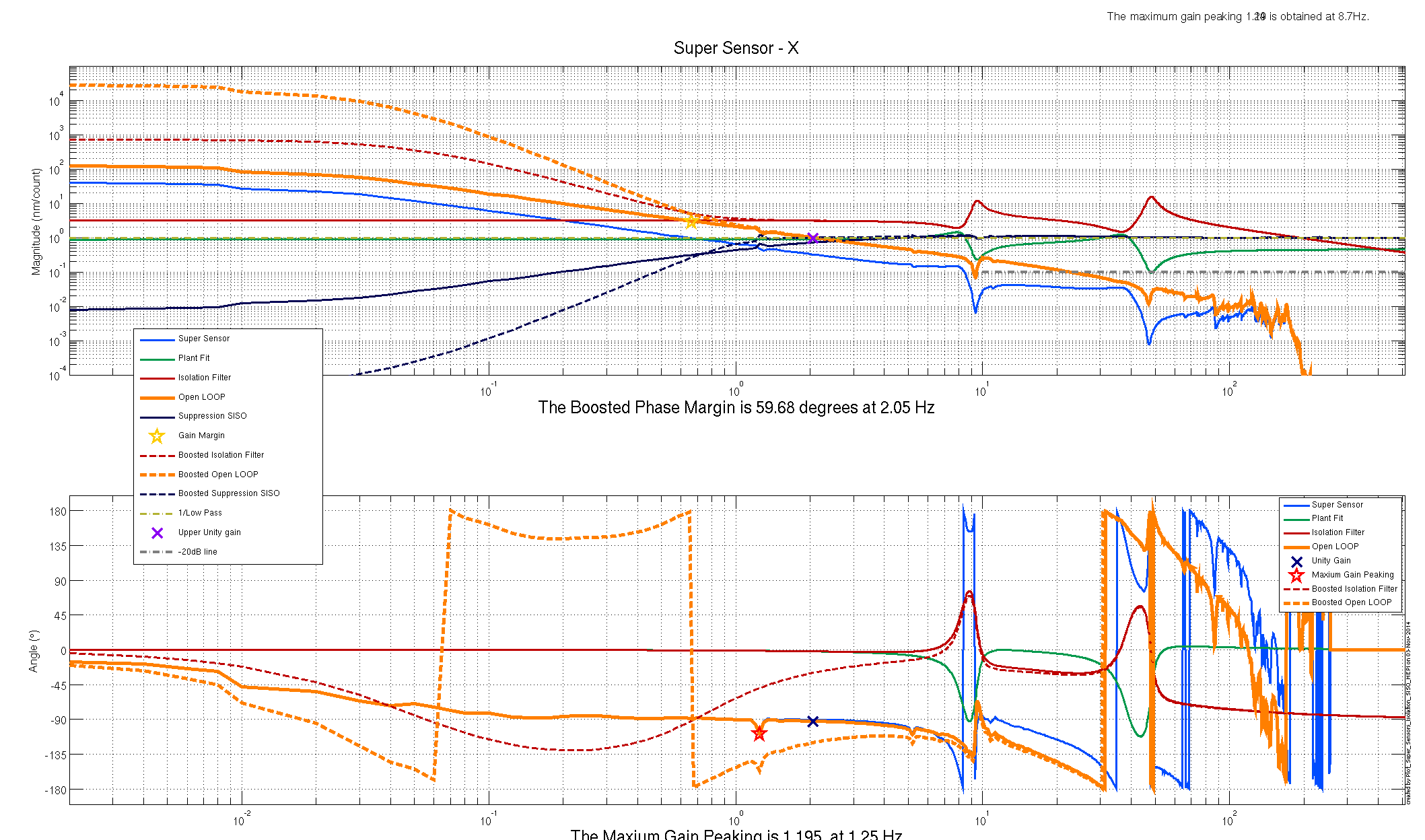
Here is another look at the controller with the amplitude scale zoomed out to see the lowest frequencies of the open loop.
J. Warner, K. Venkateswara
We repeated this measurement today and did not see the same results. Sensor correction was off. The attached pdf shows the before (old controller) and after (new low gain UGF controller) data. Very strange. We may have been fooled by different ground motion or perhaps by sensor correction. There is good coherence with ground till ~60 mHz in either controllerconfiguration.
Jim has reverted to the new low gain UGF controller as it should help with ringing of HEPI at 9 Hz.