TITLE: 12/08 Day Shift: 16:00-00:00 UTC (08:00-16:00 PST), all times posted in UTC
STATE of H1: Commissioning
INCOMING OPERATOR: Oli
SHIFT SUMMARY:
16:47UTC Robert went into the CER to turn on an AC and he turned it back on at 17:03UTC and off again at 17:18UTV
I updated ITMY mode8s setting in lscparams after confirming the settings work in a few locks, FM1+FM5+FM10 G= +0.1. ISC_LOCK and VIOLIN_DAMPING. I'm still leaving ITMYs 5/6s gain set to zero as I'm not totally confident in the settings yet, it seems to be damping mode6 but slowly ringing up mode5.
19:08UTC Lockloss
Each of the arms went through increase flashes twice and I had to intervene to find DIFF IR and again during PRMI locking, there were no flashes so I tapped PRM in yaw based on the AS AIR camera. Lockloss at OFFLOAD_DRMI_ASC
I changed the SEI_CONF to microseism before the next lock acquisition attempt
20:03 UTC DIFF IR was not able to lock, complaining of "Bad Xarm alignmen" and I looked at the Xarm error signals and they were indeed quite bad so I took us down to start an IA
20:25 UTC during MICH_BRIGHT there were BS saturations which is unusual and it was not able to make it through the state, it was due to a poor BS alignment. I adjusted the BS in pitch by almost a microradian and the camera looked much better and IA was able to continue
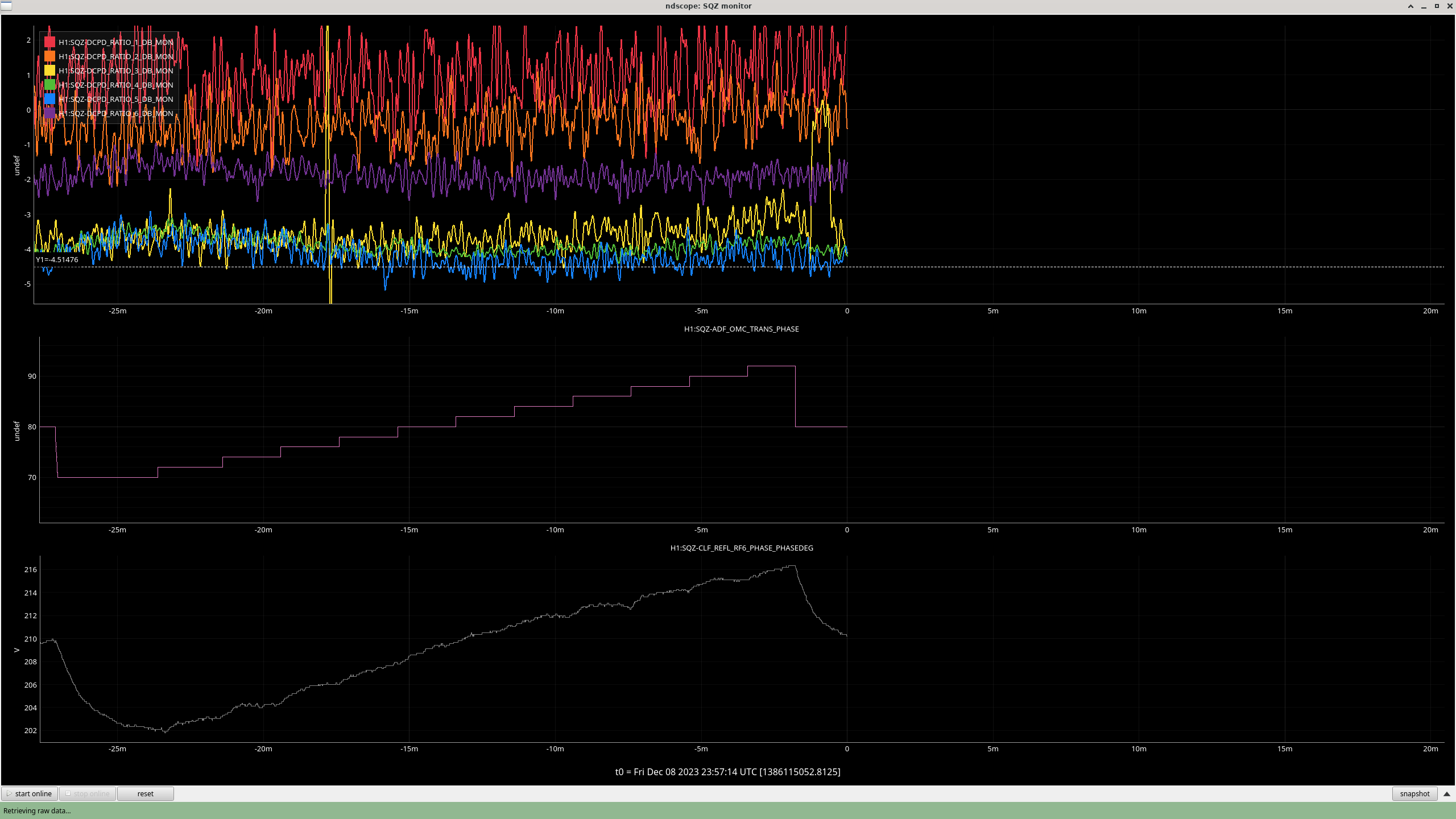
21:26 back to NLN and we started commissioning at 21:30UTC, after relocking DARM was still dominated by the ~508Hz oscillation from ITMY modes5/6 as seen in the LL.
I wasn't really able to damp ITMY mode5/6, all the settings I tried would only damp 1 while ringing up the other, I tried +/- gain with 30 degrees of phase
LOG:
| Start Time |
System |
Name |
Location |
Lazer_Haz |
Task |
Time End |
| 17:03 |
ISC |
Camilla |
Optics lab |
N |
Parts search, beam scan |
17:23 |
| 17:27 |
OPS |
LVEA IS LASER HAZARD |
LVEA |
Y |
LVEA IS LASER HAZARD |
06:47 |
| 17:30 |
FAC |
Cindi |
Laundry room |
N |
Laundry |
17:50 |
| 20:03 |
PEM |
Robert |
LVEA |
Y |
Prep for comissioning |
20:18 |
| 21:49 |
VAC |
Gerardo, Jordan |
MidX |
N |
Look at cable trays |
22:13 |